基于F2808的永磁同步电机伺服系统设计
2.4 防振荡处理
在伺服控制中,当转子转到给定位置时,电机转矩还需给负载一个保持转矩,该转矩使电机转子易发生振荡,使转子来回摆动无法快速定位。为达到快速、精确的定位功能,系统采用变PI系数的控制方法,其原理如图1所示。当位置误差足够大时(区域1和5),进行快速调节,位置和速度PI调节器参数保持不变;当位置误差足够小时(区域2和4),为防止超调,PI调节器参数逐渐变小;当转子进入防摆动区域时(区域3),PI调节器参数均设置为零,即保持位置不变。实验表明,该方法能够有效消除转子到达预定位置时停机的振荡现象。本文引用地址:http://www.eepw.com.cn/article/239399.htm

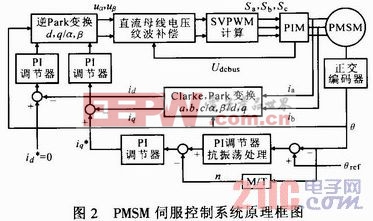
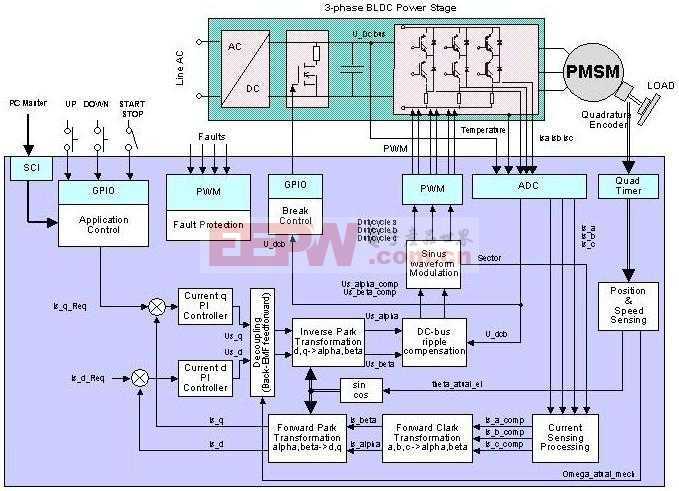
系统采用三环结构:位置环为外环,以获得准确的位置控制;速度环为中环,实现速度跟踪;基于id=0磁场定向控制的电流环设置为内环,以获得快速的转矩响应。主要控制策略包括:转子磁场定向矢量控制、空间矢量调制、直流母线电压纹波补偿、遇限削弱积分PI控制算法及防振荡处理等。
3 伺服控制系统软硬件结构及其设计
3.1 系统硬件设计
基于DSP F2808的伺服控制系统硬件结构如图3所示,主要包括F2808控制板、IGBT功率模块和驱动电路、电压电流检测电路、光电编码器位置检测电路、LCD显示电路、辅助电源及一台带增量式光电编码器的PMSM伺服实验电机。
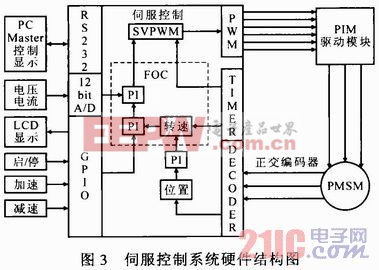
(1)F2808是一款高性价比的32位定点DSP控制器,运算速度高达100 MIPs,具有运算速度快,存储容量大,采样精度高,扩展能力强等特性,包含电机驱动的所有外设,无需扩展即可实现全部控制功能。在系统中,该DSP完成磁场定向矢量控制、空间矢量调制、直流母线电压纹波补偿、遇限削弱积分PI控制算法等的全部控制算法。
(2)系统采用电阻分压法采样检测直流母线电压,电机两相输入电流用电流霍尔LV28-NP检测,得到的电流采样信号经滤波处理、比例放大和电平提升后送入DSP的A/D采样模块。同时采样信号通过比较电路还用作软硬件保护信号,如欠压、过压、过流保护等。
(3)电机增量式光电编码器输出的正交脉冲信号经抗干扰处理后,送至DSP正交编码器QEP接口。DSP通过对输入脉冲的计数,计算出电机转子转速和相对转子位置。编码器的index信号用于初始定位和转子位置偏差的校正。
(4)系统采用LCD显示电机各运行状态参数。同时通过RS232与PC连接,开发人机界面,对电机进行实时控制和状态监控。













评论