基于F2808的永磁同步电机伺服系统设计
3.2 伺服系统软件设计
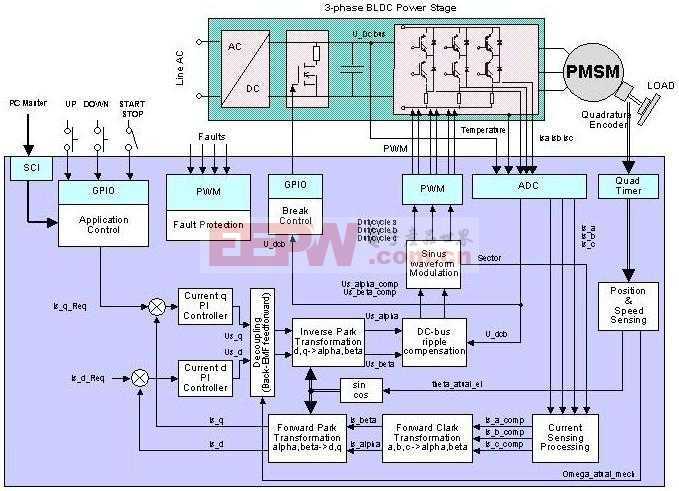
系统在进行伺服控制时,由图2可知,首先通过比较给定位置与编码器实测位置得到位置误差,该误差经抗扰动处理后,由位置PI调节器得到一个速度给定。速度给定与实测转速进行比较,经速度PI调节器得到转矩电流参考。参考电流与实际电流进行比较,误差经电流PI调节器得到电压输出向量。经直流母线电压纹波补偿后,通过SVPWM计算产生PWM控制信号,用以控制逆变器驱动伺服电机。本文引用地址:http://www.eepw.com.cn/article/239399.htm
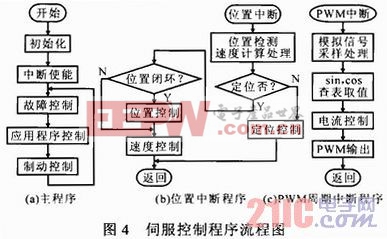
系统控制程序流程图如图4所示,包括主程序、位置中断程序和PWM周期定时中断程序。主程序主要完成DSP的初始化、故障控制、应用程序控制切换和制动控制;位置中断程序主要包括位置/速度的检测与计算、定位控制、位置闭环伺服控制和速度闭环控制等,中断周期为1 ms;PWM周期中断程序主要包括模拟信号检测,正余弦计算,电流环控制及PWM输出控制,中断周期为125μs,即开关频率为8 kHz。
4 实验结果分析
为实现上述控制,构建了实验装置,系统包括一块F2808控制板和参数检测驱动板,一台功率为300 W带增量式光电编码器(2 048线/转)的PMSM伺服电机。在此装置上进行电流、转速闭环和位置闭环实验。实验直流母线电压为72 V,PWM频率8 kHz,电压、电流的采样周期为125μs,位置和速度的采样周期为1 ms。
当电机稳态运行过程中,突加、突卸负载时,id,iq的电流响应波形如图5a所示,电流变化曲线表明该系统具有快速的转矩响应,动态性能良好。
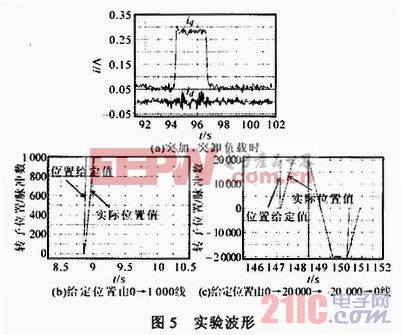
进行了两种位置实验:①给定位置从0线到1 000线的位置响应波形如图5b所示;②给定位置从0线到20 000线,再到-20 000线,最后到0线的位置响应波形如图5c所示。可见,该伺服系统可以实现快速的正反转运行,定位精度高且转速跟踪响应快,且消除了定位振荡。
5 结论
设计了一种基于DSP F2808的永磁同步电机伺服控制系统。针对工程实际,采用了直流母线电压纹波补偿、遇限削弱积分PI控制算法、防振荡处理等控制策略,实现了数字伺服控制。实验结果表明,该系统能够满足伺服控制的各项要求,并具有快速的转矩响应,在实现位置控制和速度控制时具有较高的位置控制精度。













评论