汽车电子系统--未来展望
目标和需求
当今的车辆安全电子系统在功能上是独立的,控制某些变量来响应某些输入。例如,当加速度计输出触发了限幅比较器时,安全气囊控制器会引爆其弹出装置。当车轴编码器指示出现了突然加速时,牵引控制系统会进行刹车,以减小车轮上的扭矩。这些系统虽然对车辆安全都有贡献,但是,由于其输入所表示的信息并不全面,因此,这些系统工作起来可能有不当之处。压到路面的阬上,或者停车时撞到其他车上都有可能引爆安全气囊。坑洼的路面也会导致牵引控制系统出现误动作。
Gartner的半导体研究主任Steve Ohr认为,这一切都需要改变。4月24号,在加州圣克鲁斯全球新闻峰会上,Ohr在他主持的小组讨论致辞中解释说:“高级安全气囊控制器有多个传感器,确实能够判断是否出现了撞车。在不远的将来,控制器会根据监视乘客和货物的传感器输出来确定在出现撞车时怎样更好的应用各类安全气囊。”
在这一点,安全气囊控制器会越过一个关键阈值:从响应输入,进行维持,直至响应车辆的动态模型。Ohr强调说,车辆的其系统也会对这种变化进行回应,产生连锁反应。Ohr认为:“在车道偏离和紧急危险探测器等安全系统上也有类似的情况。每一个系统都变得越来越智能,从传感器集成发展到传感器融合。”这种发展是在非常复杂的环境中进行的。Cadence设计系统公司产品市场资深总监Panelist Frank Schirrmeister评论说:“在2010年,一辆高端汽车会有750个CPU,实现2,000种不同的功能,需要十亿行代码。”Schirrmeister说,这种复杂程度迫使开发人员采用与硬件无关的平台,例如,汽车开放系统体系结构(AUTOSAR)、集成机械电子软件开发包等。在这种纷繁复杂的情况下,系统设计人员努力应对系统处理数据时出现的突然变化。
从隔离到融合
参加小组讨论会的Altera公司汽车业务部主任Brian Jentz认为,避险系统就很好的体现了这种变化。Jentz说,“今天,即使是后视摄像机等相对简单的系统也有很大的处理要求。低成本摄像机需要鱼眼校正功能来纠正图像,使得驾驶员能够很方便的看清楚所显示的内容。也需要对这些摄像机进行补偿,在低亮度条件下产生可用的图像,这一般也需要自动目标识别功能。在摄像机中能够很好的完成这些功能,但在中央引擎控制单元(ECU)中实现这些功能成本会更低一些。”Jentz还认为:“摄像机的发展趋势是高清晰,这意味着每帧会有百万像素。如果您向ECU发送图像,在这些数据离开摄像机之前,需要对数据进行压缩。”
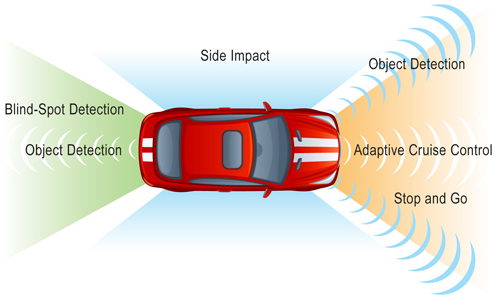
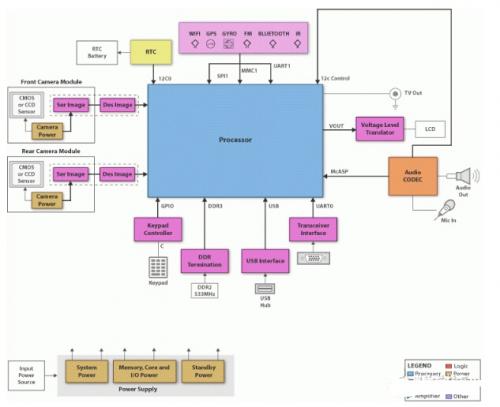
在今后的发展中,数据传送问题会越来越复杂。危险探测功能会从后视摄像机简单的显示图像发展到对车辆周围的整个动态环境进行建模。在这一点,系统必须将来自多个摄像机的图像拼接起来——至少360度范围内的8台摄像机,并且支持范围和速度探测功能,如 图1 所示。绝对需要中央处理器,ADAS需要同时将多路压缩后的视频流传送给ECU。
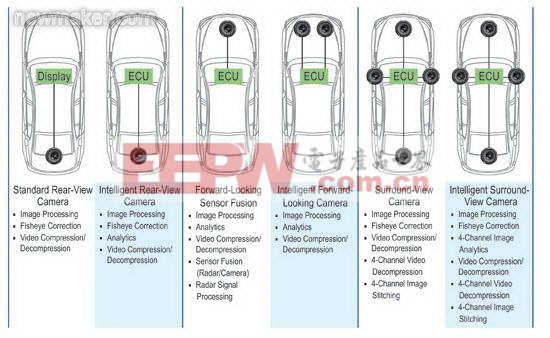
图1.摄像机布局和使用方法确定了处理图像所需要的算法
Kalman及其不足
Kalman滤波器可以处理来自被观察系统不同类型传感器的多路受噪声影响的数据流,将其组合到一个低噪声模型中。一般而言,它通过维持三种内部数据格式来实现这一功能:对当前系统状态的估算,基于物理条件的“航位推测”模型——用于预测系统的下一状态,以及评估每一输入可信性的表格。在每一循环中,Kalman滤波器将传感器数据整合到一起,利用这些数据对系统状态进行初步估算:例如,车辆周围物体的位置和速度等。同时,滤波器对前一状态应用航迹推测模型,进行第二次估算:其他车辆移动到这里、这里、那里等等,行人会走到哪里,树木应该在哪些位置等。然后,滤波器对两种状态估算进行对比,考虑到输入的可信性,采用新的最佳估算更新前一状态:在这里,认为所有的都是真实的。最后,Kalman滤波器将新的状态估算发送给分析软件,这样,软件可以评估出可能出现哪些危险,更新其传感器可信性表格,提示任何有问题的输入。
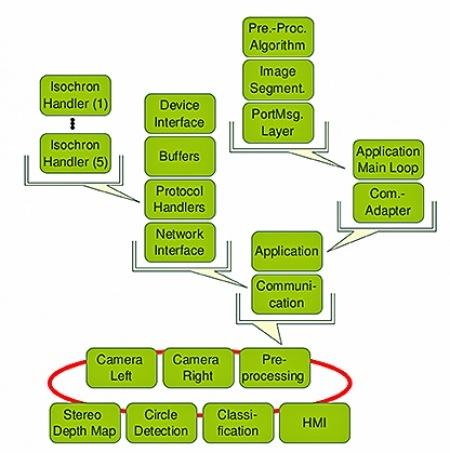
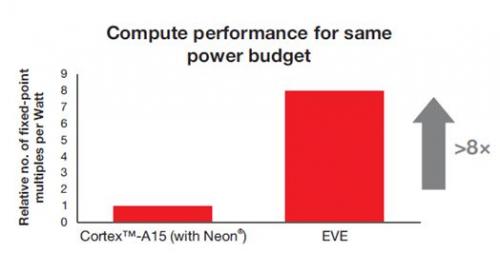
好消息是,尽管在不连续读数、较强的噪声以及各类不同的传感器数据条件下,Kalman滤波器也能够整合实现外部环境稳定精确的模型。但是也有问题。处理高清晰(HD)视频输入的Kalman滤波器会占用大量的处理资源,其分析例程也需要很强的处理能力,如 图2 所示。Jentz指出:“硅片性能已经无法满足算法开发的要求。对性能的需求基本上是无限的。”





评论