MEMS陀螺仪概况介绍

1、微机械陀螺仪的工作原理
MEMS陀螺仪利用科里奥利力(Coriolis force,又称为科氏力)现象。科氏力是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述。
科里奥利力来自于物体运动所具有的惯性,在旋转体系中进行直线运动的质点,由于惯性的作用,有沿着原有运动方向继续运动的趋势,但是由于体系本身是旋转的, 在经历了一段时间的运动之后,体系中质点的位置会有所变化,而它原有的运动趋势的方向,如果以旋转体系的视角去观察,就会发生一定程度的偏离。
2、微机械陀螺仪的性能参数
MEMS陀螺仪的重要参数包括:分辨率(Resolution)、零角速度输出(零位输出)、灵敏度(Sensitivity)和测量范围。这些参数是评判MEMS陀螺仪性能好坏的重要标志,同时也决定陀螺仪的应用环境。
分 辨率是指陀螺仪能检测的最小角速度,该参数与零角速度输出其实是由陀螺仪的白噪声决定。这三个参数主要说明了该陀螺仪的内部性能和抗干扰能力。对使用者而 言,灵敏度更具有实际的选择意义。测量范围是指陀螺仪能够测量的最大角速度。不同的应用场合对陀螺仪的各种性能指标有不同的要求。
3、微机械陀螺仪的结构
MEMS陀螺仪的设计和工作原理可能各种各样,但是主要都采用振动部件传感角速度的概念。绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。图3所示为振动陀螺的动力学系统的简单结构示意图。
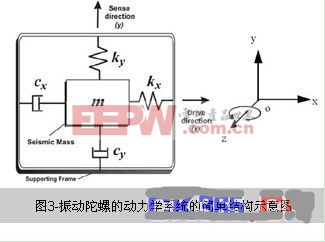
该系统为2-D的振动系统,有两个正交的振动模态。其中一个振动模态为质量块在x方向振动,振动频率为 。另一个振动模态为质量块在y方向振动,振动频率为 。 与 的值比较接近。
工作时,驱动质量块使之在x轴上以接近于 的频率 (驱动频率)振动,如果振动系统以角速度 绕Z轴转动,则会产生一个沿Y轴方向的科里奥利力,从而使得质量块在Y轴方向上产生频率为的 振动响应,通过测试Y轴方向的运动就能完成角速度 的检测。
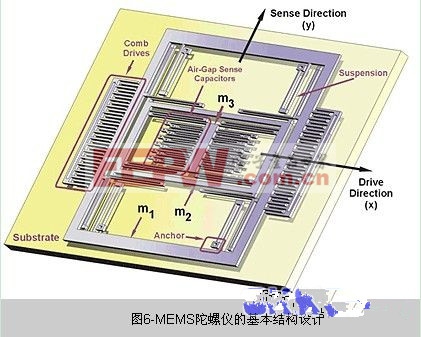
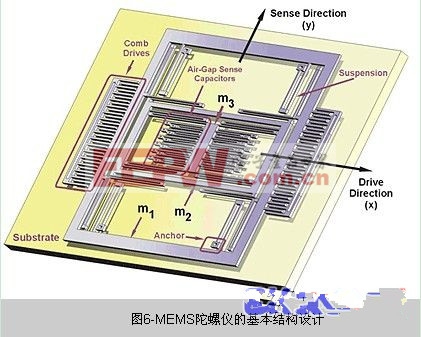
一般的MEMS陀螺仪由梳齿结构的驱动部分(图4)和电容板形状的传感部分(图5)组成,基本结构如图6所示。对于各种应用要求有各种不同的具体结构设计。



.jpg)








评论