基于LSM303DLH集成传感器的电子罗盘实现方法

电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
1. 地磁场和航向角的背景知识
如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
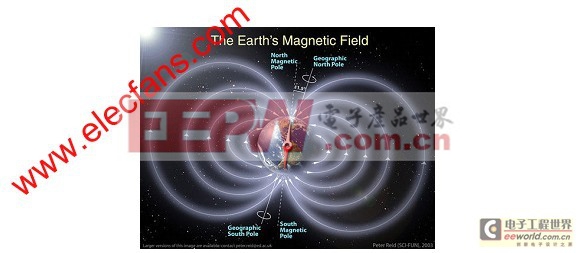
图1 地磁场分布图
地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
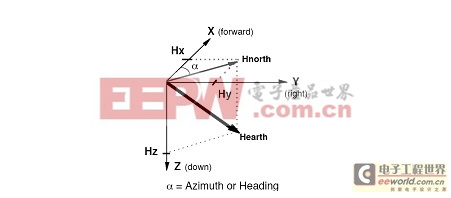
图2 地磁场矢量分解示意图
实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。当罗盘水平旋转的时候,航向角在0º- 360º之间变化。

2.ST集成磁力计和加速计的传感器模块LSM303DLH
2.1 磁力计工作原理
在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。这种具有晶体结构的合金材料对外界的磁场很敏感,磁场的强弱变化会导致AMR自身电阻值发生变化。
在制造过程中,将一个强磁场加在AMR上使其在某一方向上磁化,建立起一个主磁域,与主磁域垂直的轴被称为该AMR的敏感轴,如图3所示。为了使测量结果以线性的方式变化,AMR材料上的金属导线呈45º角倾斜排列,电流从这些导线上流过,如图4所示。由初始的强磁场在AMR材料上建立起来的主磁域和电流的方向有45º的夹角。

传感器相关文章:传感器工作原理
电流变送器相关文章:电流变送器原理 加速度计相关文章:加速度计原理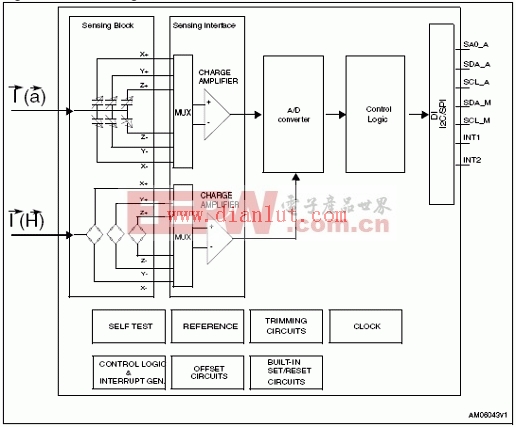




评论