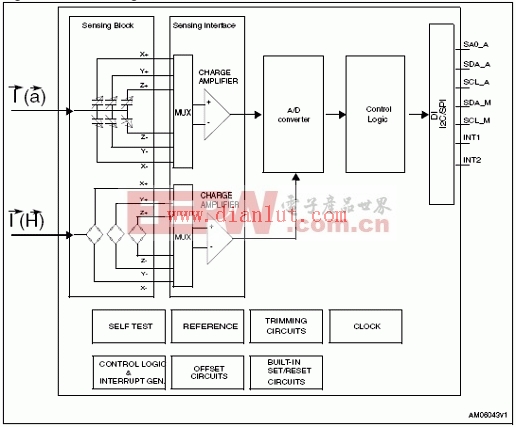
基于LSM303DLH集成传感器的电子罗盘实现方法

图12 电流对磁场产生的影响
为了校准这些来自电路板的磁场干扰,主要的工作就是通过计算将γ求出。
4.1 平面校准方法
针对XY轴的校准,将配备有磁传感器的设备在XY平面内自转,如图11,等价于将地球磁场矢量绕着过点O(γx,γy)垂直于XY平面的法线旋转, 而红色的圆为磁场矢量在旋转过程中在XY平面内投影的轨迹。这可以找到圆心的位置为((Xmax + Xmin)/2, (Ymax + Ymin)/2). 同样将设备在XZ平面内旋转可以得到地球磁场在XZ平面上的轨迹圆,这可以求出三维空间中的磁场干扰矢量γ(γx, γy, γz).
4.2 立体8字校准方法
一般情况下,当带有传感器的设备在空中各个方向旋转时,测量值组成的空间几何结构实际上是一个圆球,所有的采样点都落在这个球的表面上,如图13所示,这一点同两维平面内投影得到的圆类似。
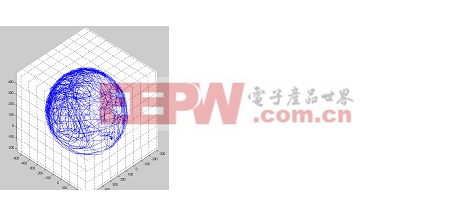
图13 地球磁场空间旋转后在传感器空间坐标内得到球体
这种情况下,可以通过足够的样本点求出圆心O(γx, γy, γz), 即固定磁场干扰矢量的大小及方向。公式如下:

8字校准法要求用户使用需要校准的设备在空中做8字晃动,原则上尽量多的让设备法线方向指向空间的所有8个象限,如图14所示。

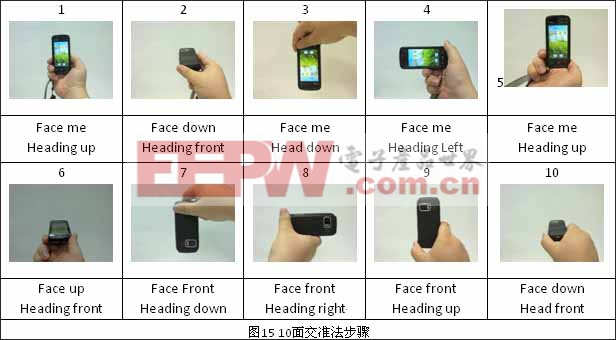
4.2 十面校准方法
同样,通过以下10面校准方法,也可以达到校准的目的。

传感器相关文章:传感器工作原理
电流变送器相关文章:电流变送器原理 加速度计相关文章:加速度计原理





评论