双超声波防撞小车系统设计

1 引言
超声波传感器因其测量精度高、 响应快和价格低廉而得到了广泛应用,传统应用方式是1 个发射头对应1 个接收头 ,也有多个发射头对应1 个接收头。但我们在实际应用中发现,如果障碍物的面很大(如墙壁),超声波传感器可以用来准确测距,但若将其应用在小车防撞系统中,由于障碍物呈柱状,而超声波发射头有一定的散射角(左右),因此即使障碍物不在小车正前方,超声波仍能检测到斜前方回波,这就给智能控制车辆行进带来困难和误导,为了解决这一问题,我们提出了一种使用双接收头的方案,并从实用角度给出了一套具体控制策略。
本文提出了一种基于单片机控制的超声波定位前方物体的监测控制系统。通过一左一右的双超声波接收头检测信号,送单片机进行数据计算处理,能够精确计算与障碍物的距离,同时判断该障碍物是否位于车辆行径的路线上。从而能保证车辆行驶中能准确避障。实验测试系统表明,该系统有效距离可达8m,测量精度可达0.05m,小车能自由避开前方障碍物,或遇到障碍物时紧急刹车停下, 但不会因为障碍物在小车斜方向而误判停止。
2 系统的结构流程设计
我们的整个系统需要完成测距,测速,定位,控制小车运动等功能,系统包括如下六部分: 超声波发射电路, 超声波接受电路,信号处理器,温度测量,小车控制电路等五部分。系统结构框图如图一所示:
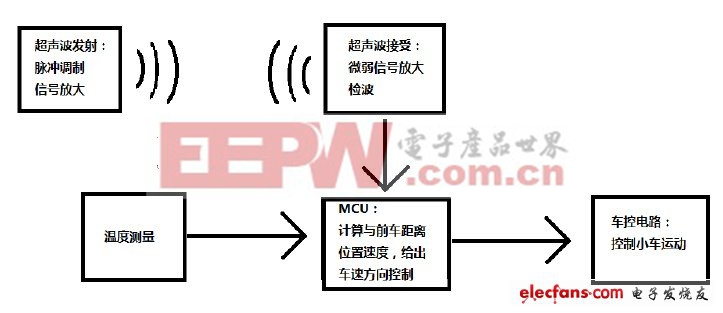
图1:系统结构框图
通过单片机产生40k 的方波,经过放大后驱动超声波传感器发射头,从而发出超声波,遇到前方物体反射后由接收端捕捉,经过对两个接收头捕捉时间的计算以及加入温度补偿,判断最终前方小车的方向与距离,再通过与前次数据差分计算出其相对前车的速度,最后通过速度、距离以及位置三个数据进行智能控制,控制小车转弯或减速慢行等。
具体的硬件组成为:MCU 采用AT89S52 单片机,P1.0 口输出超声波换能器所需的40K 方波信号,经过反相器7404 后驱动传感器,为了能使超声波发射得更远,我们并接了三个发射头,利用外中断0 口监测超声波接收电路输出的返回信号,回波检测采用红外检测集成芯片CX20106,显示电路采用简单的4 位共阳LED 数码管,断码用74LS244,位码用8550 驱动。测温部分使用18B20 测出当前的环境温度用以判断出超声波传播的速度。
3 MCU 算法控制
3.1 距离计算与方位判断
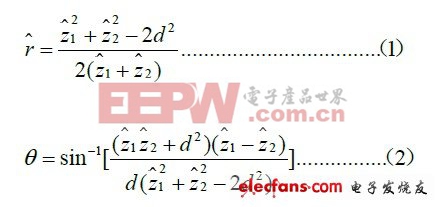
单片机可以计算出发射与接收到超声波之间的时间,根据测温系统的实际测温, 查找出在该对应温度下的声速,计算出反射物距离两接收端的距离。 理论上由以上两个数据上就可以直接数学推导出该物体的空间位置(如图2 和公式一、二所示)。

评论