变电站智能巡检机器人系统的研究与设计

1 概述
设计开发变电站智能巡检机器人系统[1],变电站工作人员可通过远程监控室,不仅对现场机器人巡检车体(以下简称车体)的运动进行控制,而且对车体的视频和红外设备进行控制。首先车体能够沿着导航设定的路线进行巡检,并根据导航系统对待检设备进行智能精准定位;其次通过红外热成像仪和可见光摄像机等成像系统对变电站设备的运行状态进行分析检测[2],并将检测数据传送至监控中心(包括远程监控室和本地监控室);最后将检测设备进行故障报警,并采取相应措施。
2 方案设计
2.1 整体框架设计
智能巡检机器人系统,既要安全可靠地完成巡检任务,在一定程度上减轻工作人员的巡检工作量,又要不破坏变电站任何装置、不影响电气设备的正常运行。整个系统由五大部分组成:变电站远程监控室、本地监控室、充电房、无线网络和机器人巡检车体;具体如图1所示。其中变电站监控室主要功能是对巡检现场的情况进行监控;本地监控室不仅能够通过上传的视频和红外图像对设备进行监控,并能通过电子地图来展现车体巡检的工作过程;同时,本地监控室把所有监测数据上传远程监控室,使远程监控室时时掌握变电站的运行状况。
2.2 整体功能设计
智能巡检机器人系统主要设计有七大功能:运动功能;语音功能;自主充电功能;巡检方式设置和切换功能;自检功能;智能故障报警功能;一键返航和链路中断返航功能。
其中运动功能设计主要包括:车体前后方向和左右方向的重复自主导航;水平和垂直两个旋转自由度;障碍物检测防碰撞;防跌落;车体云台视角范围始终不受车体任何部位遮挡影响;越障;涉水;爬坡;转弯等。
语音功能设计主要包括:双向智能语音(喊话和对讲)传输功能。
自主充电功能设计主要包括:电池供电一次充电续航能力不小于5 h,电池电量不足时车体自动返回充电室完成自主充电。
巡检方式设置和切换功能设计主要包括:巡检系统包括人工辅助遥控巡检及全自动巡检两种巡检方式[3]。自检功能设计主要包括:电机和驱动模块,传感器模块、成像系统模块、无线网桥模块,工控机模块等,以上任何模块故障,均以明显的光和声在车体和监控室后台进行报警信息提示。
智能报警功能设计主要包括两种:一种变电站设备的运行状态异常故障报警信息提示。另外一种车体故障报警信息提示。
3 机器人巡检车体设计
3.1 机器人巡检车体整体框架设计
车体设计符合人机工程,采用全驱、全向平台作为基础传动平台;系统组成包括:工控机、步进电机及驱动器、直流电机及驱动器、云台、可见光单目和双目摄像机、红外热成像仪、无线网桥、激光传感器、超声波传感器、拾音器、充电器、辅助设备、报警设备等,具体如图1 所示。

3.2 机器人巡检车体运动控制系统方案设计
运动控制系统是机器人巡检车体最关键的核心技术。
运动控制系统的主体部分由STM32 控制板组成,控制板由两块嵌入STM32F103VCT6 芯片的主板和从板组成,主板和从板采用SCI 协议进行通信。软件算法在主板上实现,采用PWM波和光电编码器控制直流电机;从板主要实现对四个转向步进电机的控制,主板得到转向步进电机位置误差参数(通过磁旋转编码器得到步进电机速度反馈信号)后通过串口发送到从板,从板再将这些参数放到通信协议里一起发给步进电机驱动器。具体见图2 运动控制硬件结构图。

STM32 主控制板与工控机通信,接收X、Y、Z(ω )3 个速度值,通过底盘矢量分解得到每个转向步进电机的速度和每个移动直流电机的速度(当前占空比),转向步进电机速度送到转向模块,与磁旋转编码器传回的数据做比较,实现位置的调整。移动直流电机的速度与A/B 相光电编码器(通过定时器和计数器获得)计数值做比较,并通过PID 调节PWM 波占空比,实现4 个车轮的直流电机控制。各个模块相互之间的关系如图3所示。

1)直流电机及驱动器设计
本项目直流电机设计考虑成本、负载力矩以及电机工作特点等因素,最终采用直流有刷MAXON 电机,其中减速比采用113,A/B 相光电编码器分辨率采用512。直流电机的PWM 控制采用定频调宽法。
本项目直流电机驱动器负责把控制脉冲转换成各电机转动角度,实现车体移动。电机驱动器采用H 桥斩波驱动电路设计,其工作原理如下:车体前后左右四轮的驱动,以STM32 芯片作为控制器,利用STM32 芯片产生四组带可编程死区时间的PWM 信号分别驱动控制[4]。
2)直流电机反馈检测模块设计
该模块主要采集反馈信号,包括电机转速、转向,蓄电池电压,电机电流等,主要由A/B 相光电编码器、ADC 采样电路完成。本项目采用MAXON 公司配套电机的增量式A/B 相光电编码器。
3)步进电机设计
本项目采用AM24HS2402-08N 步进电机,步距角1.8° 。磁旋转编码器采用AMS 公司的AS5048A。
3.3 机器人巡检车体控制系统软件设计
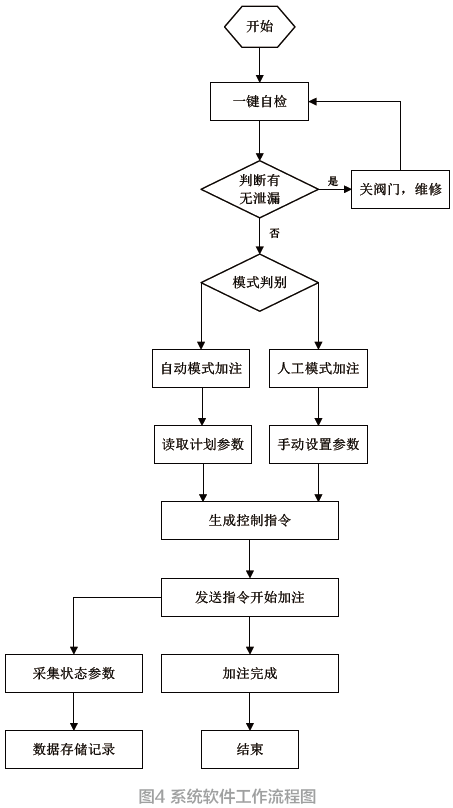
本项目软件设计充分考虑到机器人巡检车体运动的协调性,包括动力学协调和运动学协调;动力学协调指车体本体与各车轮的加速度的协调;运动学协调指车体本体与各车轮的速度、偏转角的协调[5]。车体控制策略包括:前后运动;左右运动;旋转运动;转弯运动;停止等。具体见图4 运动控制程序流程图。

图4 运动控制程序流程图
4 结束语
本文详细论述了一款智能巡检机器人系统的研究和设计。对系统整体设计、机器人巡检车体设计做了完整阐述。随着变电站的智能巡检机器人系统的安全可靠设计和功能不断完善,以实现变电站巡检任务的标准化、统一化、智能化。
参考文献:
[1]李焕明.智能机器人巡检系统在变电站的应用研究[D].广州:广东工业大学,2020.
[2]郎福成,牟童,韩月.变电站智能巡检机器人系统设计[J].电工材料,2017(6):36-38.
[ 3 ] 崔彦彬, 刘欢. 变电站智能巡检机器人系统的设计[J].设计与研究,2014(4):53.
[4]赵璠璠.变电站智能巡检机器人系统设计[J].自动化技术与设计,2020(10):233-235.
[5]胡桐.四轮独立驱动和转向移动机器人的设计与控制[D].合肥:合肥工业大学,2015.
(本文来源于《电子产品世界》杂志2023年2月期)




评论