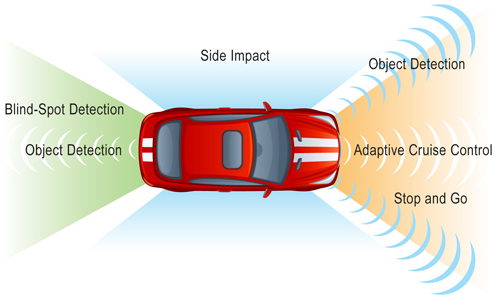
自动巡航车采用2D泛光LiDAR技术来消除盲点和确保安全
为了覆盖足够的范围,许多 LiDAR 解决方案需要配置更强大、更昂贵的光学器材和激光源。通过专利技术用软件方法对信号进行处理,LeddarTech 的泛光 LiDAR 技术具有成本优势,能够提供所需的范围和性能,在巡航车应用的商业部署中(如紧急制动和盲区监控)
本文引用地址:http://www.eepw.com.cn/article/201904/399561.htm具有极大的吸引力。
最终结果
为确保覆盖到所有盲点区域,可以使用 Leddar 传感器模块实施两种主要架构类型。如果巡航车生产商需要其他级别的分辨率、量程或覆盖范围,则可根据具体应用场景选择相应的模块或架构。因此,如果设计团队可以接受一些盲区,则需要的传感器数量会减少。
1. 第一种结构提供了短程安全车壳,可以覆盖巡航车的各个侧面并消除盲点区域。
为实现这一目标,我们采用了八个 Leddar M16-LSR LiDAR 模块,它们具有 100 度水平视场和 12 米行人(低反射率)量程,这八个模块直接安装在巡航车的车身中,距离地面的高度从 20 厘米到 75 厘米不等,可以检测到近处的小物体。

图 第一种传感器架构所提供的短程安全车壳视图。
2. 第二种架构类型在巡航车的侧面和后面采用短量程覆盖,而在车身前面则扩大覆盖范围,可用于冗余防撞系统。为实现这一目标,我们将五个具有 100 度 FOV 的模块放置在巡航车的侧面和后面,将两个具有更大覆盖范围和更高分辨率的 M16-LSR LiDAR 传感器(48 度 FOV,30 米行人范围)放置在车身前面。

图 第二种传感器架构所提供的短程车壳视图,车身前面覆盖范围更长。
使用 LeddarTech 的固态 LiDAR 技术实现巡航车安全车壳
下面简要介绍了 LeddarTech 的 2D 泛光 LiDAR 解决方案,自动巡航车开发人员在安全车壳和紧急制动中采用了该解决方案。
Leddar M16-LED和 M16-LSR 模块
模块根据照明方式不同有两种主要的配置类型:经典 LED 系列和新型激光系列。这两种 M16 系列都非常适合户外操作:它们采用固态设计,无需安装电动机械、工作温度范围宽、适应各种气候、不受照明条件影响。

是经过验证的 Leddar 主力产品,因其多功能性和可靠性而倍受客户青睐。该模块的红外 LED 光源最大可提供 100 米范围的宽光束照明,并具有六种不同的视场配置。M16-LSR 使用激光源实现更长的量程,并提供更窄和具有更优定义的垂直 FOV,相比 M16-LED,的外形更小。
主要功能和优点包括:
• 出色的角度分辨率,使用 16 个独立的分段同时跟踪并同时采集
• 不同光束选项,实现最优的视场(FOV)
• 多目标跟踪和横向辨别能力
• FOV 检测范围高达 165 米(541 英尺),并且和目标相关(M16-LSR 相对于反光目标)
• 快速数据采集时间(高达 100 Hz)
• 具有各种光束选项,可适用于各种混合车辆配置
未来计划
泛光 LiDAR 技术正在迅速发展。得力于新型 LiDAR 架构的深入开发和信号处理的持续改进,更新、更强大的解决方案指日可待。同时,广阔的市场和大量的应用需求也是强有力的驱动因素。最终,泛光 LiDAR 技术将更具成本效益,并且其性能将在未来几年完全取代机械式扫描仪,这也正是汽车行业专家所预期的。因此,已经被自动巡航车作为传感器套件的一部分而采用的泛光 LiDAR 解决方案,将在下一代产品得以广泛使用时发挥更为重要的作用。
基于 LeddarTech 专利技术、具有卓越量程和分辨率的 3D 固态泛光 LiDAR 即将推出,它能满足先进的自动巡航检测需求。






评论