为什么网红利器“手持云台”拍摄不会晃动

爱看“抖音”等小视频的人,发现网红们边走边拍,画面不抖动乱晃,和拿手机自拍时效果不一样,为什么呢?原来这里要用到一个工具—--手持云台!手持云台会感知运动状态,通过运转电机使得手机保持稳定,拍出来的画面不晃动。
本文引用地址:https://www.eepw.com.cn/article/201809/391886.htm手持云台的核心算法在于利用FOC电机方案,实现云台三个维度的精细调节。对于三路BLDC,MCU通过位置环,速度环,电流环实时监控电机的位置状态信息,以及电机的安全运作。以保证在身体走动,外界抖动过程中,在极低误差范围内,手机保持水平。因此,手持云台的控制框架:

运动控制:1-3颗带有FPU,浮点运算单元的MCU,用于处理FOC算法,X,Y,Z三个维度每路各一颗步进电机,每路步进电机需要1片三相半桥驱动芯片,或者6片 MOSFET构成的H桥,控制电机转速以及换向。
反馈机制:在电机位置检测时,一般需要霍尔元件或者磁编码器实现电机位置检测,从而实时调整电机状态。为确保每路步进电机运行过程中的正常工作,还需要利用运放采集电机驱动芯片的电流,以确保电机正常运作,或是停滞,防止故障后损坏机器。
人机交互控制:目前市面上大致用三类,线控,BLE,WIFI,由于手机端标配BLE,所以云台人机交互控制采用BLE方案居多,但是BLE数据带宽较低,不适合高清数据高速传输。因此也有部分厂家采用WIFI,实现视频流的高速传输。
供电系统:云台的供电系统:一般为锂电池供电,一路升压的24V左右,为电机驱动芯片或者MOSFET提供电压,确保电机运作,一路升降压到3.3V或者5V给MCU供电。
话不多说,看图更直观。
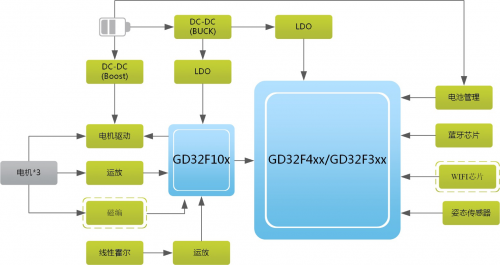
图1 云台框架
1、主控单元:
主要完成完成三个事情:
(1)电机控制。读取姿态传感器信号确定云台当前姿态,即采样定子电流电流,先后经过Clark,Park运算,PI运算计算需要调整的参数,经过Clark,Park逆运算,转化输出为励磁电流,然后与转速环相比较,控制输出PWM,从而控制电机,MCU需要完成FOC速度控制模式算法,PID算法。
(2)无线数据交互。MCU需要通过蓝牙链接手机等平台摄像设备,控制拍照,完成人机交互。
(3)协调控制云台系统。
GD32F4XX系列MCU,200Mhz主频,3MB Flash 256K Ram,同时自带硬件FPU,对于需要较大RAM的处理FOC,PID算法的电机控制系统很具优势,同时具备电机控制的高级定时器,正交编码器接口,霍尔传感器接口,可以采集电机速度,位置,以及电流形成闭环控制,可编程PWM模式,可以灵活控制三相电机实现电机快速实现响应。
2、电机驱动
电机驱动:可以采用集成驱动IC或者分立MOS自行搭建集:
集成IC:控制简单,集成度更高,IC自带欠压保护,短路保护,死区控制,但是由于MOS内部集成,散热差,驱动能力一般。
分立驱动方案:集成度较低,分立MOS一般具有较大电流,散热好,驱动能力较好,MCU一般在输出PWM时自带死区控制,但是在短路,过热,欠压等状态提醒略显不足
目前在我司代理的MPS产品线,有成熟的电机驱动芯片,该芯片针对各种负载条件做了死区时间、对称性能优化,且内部MOSFET设置5.5A电流限制,超过该极限时,过流桥将进入高位阻抗状态,若芯片温度超过160℃,所有内部开关将关闭,防止过热损坏。
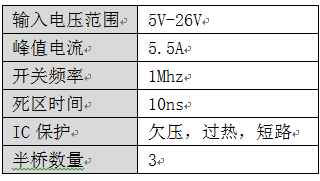
表一 电机驱动参数
3、电源
手持云台内部为锂电池直接供电, 需要充电管理芯片,BUCK,BOOST,LDO等诸多电源IC,电源分支可以分为->3.3V MCU分支,->24 电机驱动分支 ->其他外围分支。这里不一一列出,如果有需要可以直接和ZLG销售人员联系我们将为您定制完整的电源解决方案。
4、无线传输
手持云台目前主流的无线方式是BLE,相比传统的线控,无线更方便快捷,且每部手机都配有蓝牙功能,后续随着云台功能形态的转变,需要更高的数据带宽,以及更远的传输记录,WiFi不失为一种更好的选择。目前为大家推荐我司代理的两颗BLE芯片:
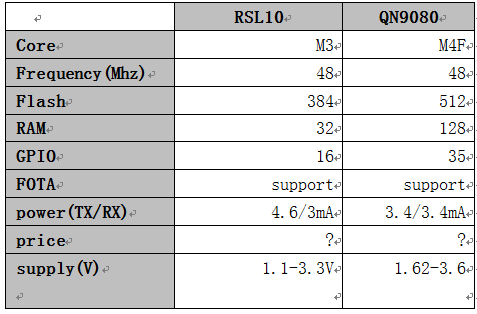
表二 蓝牙芯片参数
如表二所示。两颗IC均为BLE5.0,相比BLE4.0/2,功耗更低,且支持FOTA功能,对于手持设备,续航时间将更久,相比于其他蓝牙SOC,RSL10的电压范围更广,对于锂电池供电的手持云台,电能利用率更高。








评论