一种旋变位置解码系统的设计方案

1.引言
本文引用地址:https://www.eepw.com.cn/article/201809/388596.htm随着永磁同步电机在工业、农业、航天等各领域的广泛应用,永磁同步电机在电动汽车驱动系统领域也得到同步发展。众所周知,永磁同步电机的稳定可靠运行,需要安装位置传感器来检测位置信号。因旋转变压器(简称旋变)通过与相应的解码芯片配合即可对电机转子位置进行检测,所以旋变作为较为可靠的绝对位置传感器被广泛采用。目前很多专家学者开始研究旋变位置解码系统[1-4],随着旋变及其解码芯片技术的不断发展,旋变的可靠性更高,解码电路也更加紧凑。本文采用当前最新一代可变磁阻旋变和与之配合的解码芯片AD2S1205,设计了相应的旋变位置解码系统,并通过测试系统验证了系统的可靠性。
2.旋变工作原理
旋变的通常配置是初级绕组位于转子上,两个二次绕组位于定子上。本系统采用的可变磁阻旋变的转子上则不存在绕组,如图1所示,初级绕组和二次绕组均位于定子上,转子的这种特殊设计可使得次级耦合随着角位置变化而发生正弦变化。
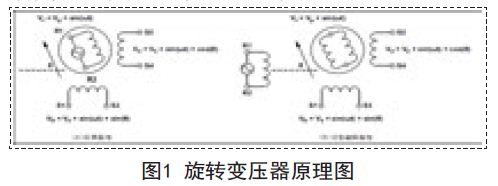
无论何种配置,旋变正弦绕组的输出电压是S1? S3,余弦绕组的输出电压是S2 ? S4,如(1)式和(2)式所示。其中:θ 为轴角,ω 为转子激励角频率,E0为转子激励幅度。

可变磁阻旋变初级绕组采用交流基准源激励,两个次级绕组机械上交叉90°。定子二次绕组上耦合出的电压幅度是转子相对于定子角位置θ 的函数,旋变输出信号如图2所示。

转换器跟踪轴角θ 的原理为,转换器产生输出角φ ,然后反馈φ 以与输入角θ 相比较。当转换器正确跟踪输入角度时,二者之间的误差将被驱动至0.为了测量误差,将(1)式乘以cosφ ,(2)式乘以sinφ ,其差值为:
当角度误差(θ ?φ )的值很小时,(4)式即近似等于0 E (θ ?φ )。AD2S1205具备一个由相位敏感解调器、积分器和补偿滤波器形成的闭环系统,可力求使误差信号归零。当该目标实现时,在转换器的额定精度范围内,输出角φ 即等于旋变角度θ .
3.硬件电路设计
硬件电路的设计是围绕AD公司的解码芯片AD2S1205展开的。首先,该芯片是一款完整的12位分辨率跟踪分解器数字转换器,内置可编程正弦波振荡器,为旋变提供正弦波激励,工作频率范围为8.192MHz±25%.该芯片采用Type II跟踪环路,可用于跟踪输入信号,并将正弦和余弦输入端的信息转换为角度和速率所对应的数字量,其最大跟踪速率是外部时钟频率的函数。Type II跟踪环路能够连续输出位置数据,且没有转换延迟,它还能提供噪声抑制,以及参考和输入信号的谐波失真容限。
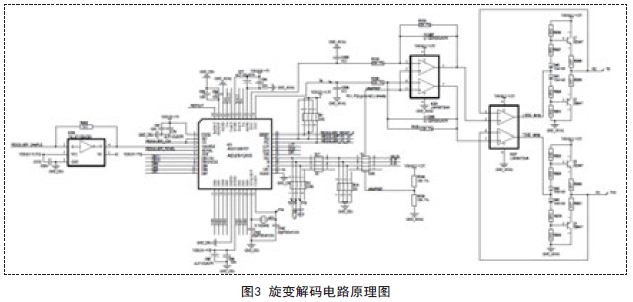
图3为旋变解码电路原理图。首先由AD2S1205解码芯片产生差分正弦励磁信号,经过运放放大、跟随后,通过推挽的方式输出到电机旋变。电机旋变返回的差分信号S1? S3、S2 ? S4,经IC26运算后送AD2S1205进行处理。SINLO和COSLO同时接入到REFOUT的目的是增强信号的稳定性,信号放大倍数为1.5.
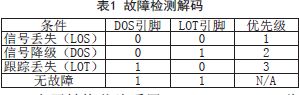
针对故障检测,芯片内部有相关的故障检测功能,其相关故障的优先等级和故障码如表1所示。
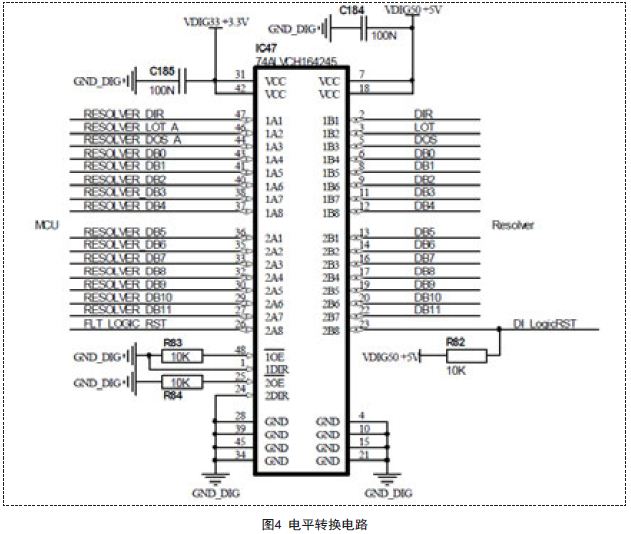
电平转换芯片采用74ALVCH164245,此芯片把旋变信号转为3.3V后送单片机,其电路如图4所示。
4.软件设计
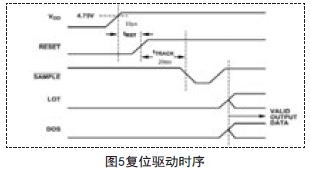
4.1 复位时序
图5为AD2S1205复位驱动时序。





评论