差分编码在水声电子通信中的应用研究

1.引言
本文引用地址:https://www.eepw.com.cn/article/201809/388492.htm长期以来,人们一直认为在海洋中实现水声通信是一个巨大的挑战。本文将专门研究一个固定信源和随着水波不停移动的接收器的通信问题。这样会导致信号同步问题和时变的多普勒频移。另外,在浅水中通信,当信号沿着不同的传播路径(多径)传播最终汇集到接收器的过程中会产生码间串扰的问题。
国外Gini和Giannakis最近提出了一类差分编码方法,它包括DBPSK调制方法。他们的研究显示:改进因发射器和(或)接收器的运动而造成的非线性信号失真的补偿,在理论上能获得比DBPSK调制更好的效果。他们的研究借鉴了电磁波通信,例如卫星和地面站间的通信,他们的仿真证明使用某种广义差分编/解码体制和仿真参数会产生较少的符号误码。
Gini和Giannakis当时并未提及码间串扰问题,但他们将这个问题作为未来研究的一个领域。
目前我们正在研究在水声通信中是否会获得相关性能提升。为了达到这一目的,我们设置了一个包含固定信源和一个在固定点附近随着波浪微动的接收器的浅水信道仿真环境。
接收器的运动幅度相当小,相当于平静的海面条件。我们得出广义差分编码体制对信号性能没有改进作用。对比之下,在我们仿真期间得到的最佳结果出现在使用普通DBPSK调制方式时。
2.背景环境
假设模拟环境由如下条件构成:50m水深处均匀稳定的水域,声速为1500m/s,水的密度为1000kg/m3,对15kHz信号的衰减为2.5dB/km.此声媒介覆盖在密度为1600kg/m3,压缩(P)波速度为1515m/s,压缩波衰减为0.5dB/λ ,横波速度为100m/s,横波衰减为1dB/λ 的均匀固体半空间上。一个基本点声源固定在坐标(x,y)=(0,0)处,同时在深度z=47m处放置一个在中心位置(x,y,z)=(1500,0,2)附近随着水面波不停摆动的接收器。
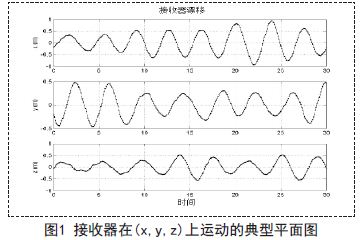
波浪状运动的接收器开发了一个模型,它满足平静海洋的特征,周期为若干秒,振幅为0.5m.设想一个固定在海底的一个稳定信源,与悬挂在船边的浮标通信。由于水波的运动,接收器在浮标周围浮动。浮标运动的典型时间序列轨迹如图1所示。
固定信源在15kHz载波条件下以固定频率输出,然后经过BPSK调制,速率为3kbps.载波周期和调制周期都在零时刻零相偏作为同步的开始。每bit包含5个载波周期。通过在运动的接收器处用240kHz或用16倍的载波频率进行采样产生一个合成的时间序列。运用经典射线追踪方法,只用24道射线模拟声波传导。
除了在运动的接收器处合成的一个时间序列外,在假想接收器处合成一个无噪声的参考时间序列,假想接收器的位置在接收器位置的均值处。这个参考时间序列生成虚拟踪迹,用来评估常规判决反馈)均衡器(DFE)。这个参考序列由23或24道射线产生,省略直达路径上那条射线。
两个时间序列经过一个时延同时开始采样,这个时延等于连接信源和接收器均值位置的直接路径的传播时延。这种方法提供了一个信号同步的参考位置(固定接收器的位置)。
BPSK调制生成基带-1和+1两个基本符号,各自表示二进制数字符号0和1.一个伪随机数字发生器用基本的{-1,1}来产生一系列随机二进制“信息”符号,每个符号出现的概率相等。这一系列“信息”符号随后使用一种Gini和Giannakis广义差分编码方法进行差分编码,就是使用所谓的ml-HIM(多滞后高阶瞬时量)变换。
二阶ml-HIM编码的输入与输出关系如下:
wd(n)=w(n)wd(n-m1) (1)
其中{w(n)}是一组输入符号,n是信号速率为3kbps为的离散时间指数,m1是(绝对)时延,{wd(n)}是输出的符号序列。如果设m1=1并且用方程(1)做BPSK的输入{w(n)},可以得到普通DBPSK输出{wd(n)}.
三阶ml-HIM编码的输入与输出关系如下:
wd(n)=w(n)wd(n-m1)wd(n-m2)wd(n-m1-m2) (2)
其中m2是额外的时延,其值根据具体条件大于或等于m1.在BPSK的输入为{w(n)}且时延m1=m2=1时,输出序列{wd(n)}为双重差分BPSK,或写作DDBPSK输出。
往在运动接收器处合成的时间序列中添加高斯白噪声,无噪声参考时间序列随后被去掉。这样产生一个粗略的判决反馈均衡器,用来评估固定接收器处的无噪声时间序列的信道。
“均衡器”的输出用(1)式和(2)式逆向求解。对于二阶ml-MIM,(1)式逆方程为:
x3(n;m1)=x(n)x*(n-m1) (3)
其中{x(n)}是接收器处得时间序列,星号表示共轭。三阶(2)式的逆方程为:
x3(n;m1,m2)=x(n)x*(n-m1)x*(n-m2)×x(nm1-m2) (4)
(3)式和(4)式的输出在复数域被量化为BPSK符号-1或1.通过与原始信息对比,作为一种统计误比特数的途径。






评论