3.3V CAN收发器将在工业市场大展拳脚

在过去几十年间,控制器局域网 (CAN) 应用已经从主要使用5V协议控制器转变为大部分包含3.3V控制器。然而,5V CAN收发器的使用仍旧很普遍,所以经常看到3.3V控制器与5V收发器配对使用的CAN收发器应用。可以通过在特定应用中采用一个3.3V CAN收发器解决这种设置中出现的一些问题。
本文引用地址:https://www.eepw.com.cn/article/201808/387645.htm在一个应用中将控制器和收发器的电源电压混合在一起需要为每个电压配备至少一个经稳压电源轨。在某些情况下,仅仅是为了支持5V收发器,就会增加成本、电路板空间、以及总体设计复杂程度。对于这些应用,将CAN收发器切换至3.3V电源轨能够缓解这个问题。
图1显示的是采用5V收发器和3.3V控制器的双电源轨应用的方框图。图2显示了在CAN收发器和控制器均由3.3V电压供电运行时有可能实现的更简单设置。
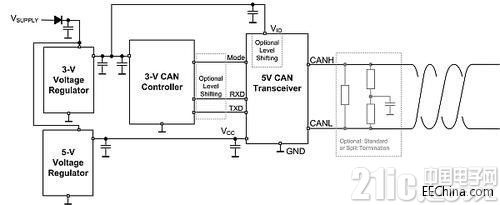
图1:双电源5V CAN收发器应用
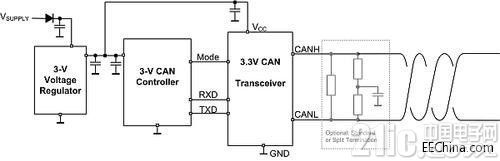
图2:单电源3.3V CAN收发器应用
一个常有的顾虑就是针对5V和3.3V CAN收发器的共模偏置电压的不同,以及这可能导致的通信问题。幸运的是,这个问题已经由ISO18898-2标准所解决,这个标准需要CAN兼容收发器的接收器部分能够处理-2V至+7V的共模范围。这一要求在ISO11898-5标准发布版本中被进一步扩展至±12V范围。
图3显示了3.3V收发器(通常情况下,偏置到0.7*Vcc,以符合2V和3V CAN标准要求),5V收发器的共模偏置电压范围,以及2个CAN标准所要求的共模输入范围。除了那些由混合5V和3.3V CAN收发器所导致的共模偏移,仍然有很多较大共模偏移裕量。由于共模偏移不是很严重的问题,这就实现了互操作性。
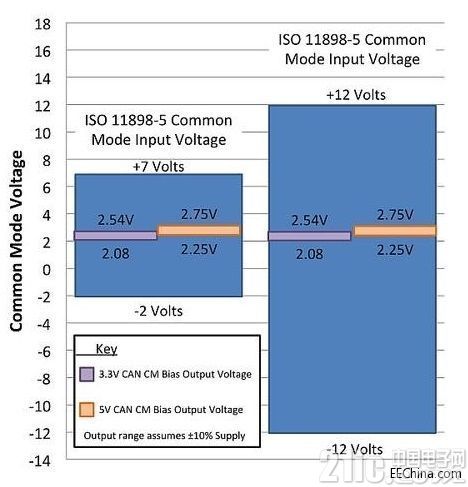
图3:CAN共模范围
在将3.3V CAN收发器的共模偏置电压设定为除了0.5*Vcc以外的任何值时,有一点需要注意,那就是器件在发送时会出现共模位移。这个位移出现的原因在于高端和低端驱动器的驱动强度大体相同,从而使获得的显性位处于Vcc/2的居中位置。每当3.3V收发器在隐性和显性位之间转换时就会出现0.7*Vcc到0.5*Vcc的共模位移(图4)。
共模电压的位移会在总线上形成有害的传导和辐射放射。为了消除这些放射,可以在总线上放置一个分离式端接来过滤共模噪声(图5)。可通过改变电容器的值来调节这个过滤器。

图4:3.3V CAN收发器的共模位移
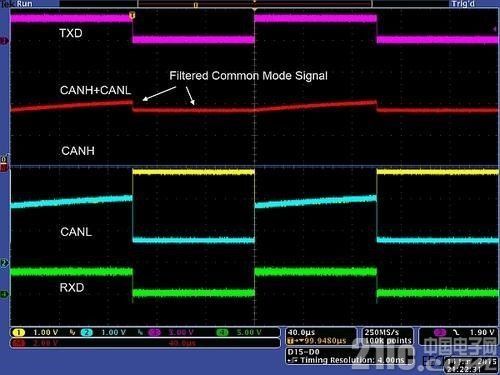
图5:共模滤波
另外一个添加3.3V CAN收发器的常见问题是它们的输出差分电压要小于5V CAN收发器的输出差分电压,因此抗噪性较低。CAN标准通过要求所有收发器能够驱动最低1.5V的输出差分电压,并要求接收器具有设定在0.9V差分电压上的输入阀值电压来解决这个问题。因此,只要3.3V收发器能够驱动1.5V的最低电压,系统中就会形成0.6V的电压裕量来应对线路损耗和噪声容限。为了补偿电压净空的减少,通常情况下,3.3V收发器内的驱动器的尺寸要大于5V收发器内的驱动器。
总之,很多人错误地认为不能在同一网络中将3.3V和5V CAN收发器混合在一起使用,或者说,无法构建一个稳健耐用的3.3V CAN网络。而事实并非如此。在上市10多年之后,3.3V CAN收发器在诸如大型家用电器、服务器背板、智能电网、和电池供电类器件中仍然受到青睐,就是因为它们能够简化终端产品设计。牢记这一点,并且时刻注意共模放射,那么3.3V CAN收发器就能够在更多不断向前发展的应用中大展拳脚。









评论