基于ADSP-BF609的汽车前向防撞系统硬件设计
作者 曹景胜1 石晶1 单鹏1 郭银景2
本文引用地址:http://www.eepw.com.cn/article/201805/380757.htm1.辽宁工业大学 汽车与交通工程学院(辽宁 锦州 121001)
2.山东科技大学 电子通信与物理学院(山东 青岛 266590)
*基金项目:辽宁省教育厅重大科技平台资助项目——基于机器视觉的汽车前向碰撞预警(FCW)主动安全系统研发(编号:JP2016014)
曹景胜(1984-),男,硕士,实验师,研究方向:智能汽车电子系统与汽车主动安全技术。
摘要:以摄像头采集的视频图像为输入,以ADSP-BF609微处理器为运算处理核心,详细描述了汽车前向防撞主动安全辅助系统的硬件平台架构和各个模块电路设计,并研制了样机。实验表明,电路设计可靠稳定,为汽车高级驾驶辅助系统(ADAS)的研究和开发提供了硬件平台。
0 引言
汽车作为人们出行的重要交通工具得到了快速发展,但是随之而来的交通事故也频繁发生[1],其中由于驾驶员反应不及时、操作不当、疲劳驾驶等导致的汽车前向追尾是造成交通事故的最主要原因之一。随着集成电路技术的飞速发展,高级驾驶辅助系统(Advanced Driver Assistance Systems,简称ADAS)已经成为当前汽车主动安全领域的研究热点[2-3],ADAS主要包括汽车前向防撞预警系统(FCWS)、车道偏离预警系统(LDWS)、行人检测(PED)等。其中汽车前向防撞预警系统在高级驾驶辅助系统中具有非常重要的作用,其利用安装在汽车上的摄像头,在第一时间采集前车视频信号[4],并进行图像处理、识别、测距,从而提示驾驶员察觉潜在的危险,提高汽车行驶主动安全性。
1 系统总体架构
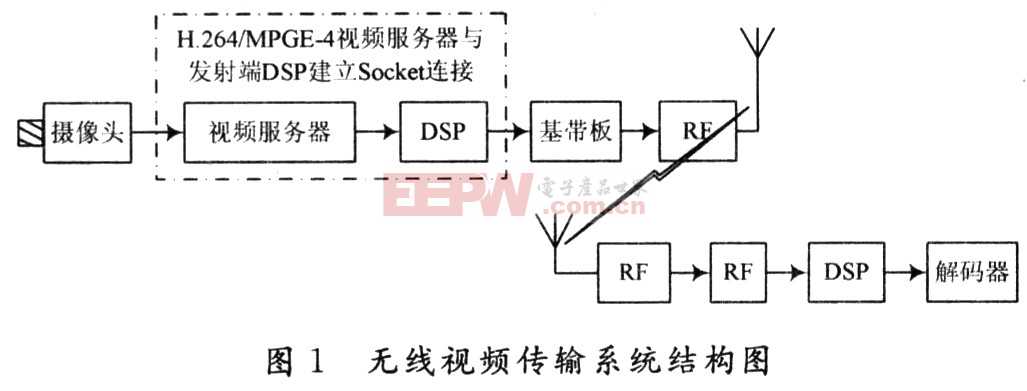
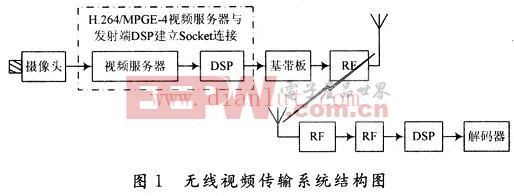
系统以微控制器ADSP-BF609芯片为硬件平台核心,汽车前端安装高精度数字摄像头,实时采集前车视频图像,并运行图像处理、识别、测距算法计算汽车与前方车辆或者障碍物距离,若与前方车辆或者障碍物距离低于安全距离时,系统能及时进行声光电预警,提醒驾驶员集中注意力,能够提前预判汽车行驶工况,做出有利措施,提高行车安全系数。总体架构示意图如图1所示。

2 硬件设计
本系统采用的前端传感器为摄像头,基于视觉技术进行前向汽车的识别与测距,因此系统的核心处理器必须采用高性能的芯片,才能完成实时的运算处理功能。设计中采用了ADI公司的ADSP-BF609 Blackfin处理器。外围配以车载电源电路、视频采集电路、视频显示电路、语音告警电路、串口调试电路等。其系统硬件设计框图如图2所示。

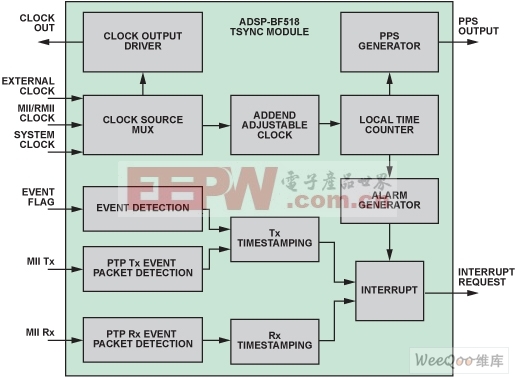
2.1 ADSP-BF609芯片配置
ADSP-BF609 Blackfin处理器针对嵌入式视觉和视频分析应用进行了优化,内部集成了双核定点DSP处理器和独特的流水线视觉处理器(PVP)。PVP是靠近Blackfin内核的一组功能模块,专为加快图像处理算法和降低整体带宽要求而设计[5]。由于具有以上的优点,使得BF609微处理器适用于汽车高级驾驶辅助系统、工业制造系统中的机器视觉和机器人等领域。
BF609微处理器内部存储器包括L1和L2两类存储器,其中L1存储器分为64 KB的数据存储区域和80 KB的指令存储区域;设计中将Core0内核的地址0XFF800000开始的16 KB区域配置成SRAM,将Core1内核的地址0XFF610000开始的16 KB区域配置成Cache,通过2组配置的分组关联指令高速缓存和数据高速缓存大大加快了存储器访问速度。
BF609微处理器在复位后,其引导模式由专用SYS_BMODE输入引脚决定,由复位配置寄存器的SYS_BMODE位来实现,引导模式如表1所示。本设计中由于BF609微处理器最小系统外扩展了2M 16bit的SST39VF3201 NOR FLASH存储芯片,因此将引导模式配置成存储器引导加载。

2.2 车载电源电路
本系统是汽车高级驾驶辅助系统中的一种,属于车载设备范围,考虑汽车环境电源为12 V直流电实际工况,设计了车载电源电路。采用LM2596S-5.0电源转换芯片,该芯片内部集成频率补偿,使得输出的电压误差在 范围内,具有很好的线性和负载调节特性,输入电源为车载12 V直流电,通过该电路转换出的5 V直流电供下一级电路使用,其电路原理图如图3所示。


2.3 视频采集电路
硬件设计中采集前车视频图像的传感器选用的是具有300万像素的OV3640数字摄像头,如图4所示,其通过I2C总线与BF609微处理器的双线串行(TWI)接口相连形成控制通道,主要用于配置摄像头寄存器。摄像头采集的视频图像数据流输入到BF609微处理器上的高速并行外设接口(PPI)接口进行运算处理。接口电路图如图5所示。

2.4 视频显示电路
本系统硬件设计定位在车载应用,设计中采用的是数字式视频采集传感器和视频显示器件,因此并未涉及模拟转数字遇到的编解码问题,这也符合车载电子设备设备体积小、低功耗、便携式等特点。具体到视频显示电路采用的是车载4.3寸TFT液晶显示屏,其具有宽工作温度范围、供电电压低、无闪烁、便于集成等优点[6],考虑到夜晚行车的具体工况,设计中采用MIC8827芯片进行液晶屏的背光驱动,该芯片为1.2 MHz的PWM白光LED驱动器。将经过BF609微处理器运算处理后的前车测距图像显示到该液晶显示屏,供汽车驾驶员随时了解和掌握。其电路原理图如图6所示。

2.5 语音告警电路
汽车行驶过程中当与前车距离低于安全距离时,此时系统能及时给出预警,设计中采用了语音告警机制,选用了ISD1820录放芯片,该芯片内置喇叭驱动放大电路,能够自动节电,电流可低至0.5 μA。将ISD1820录放芯片的控制使能端连接至BF609微处理器的中断引脚,当预警发生时,通过触发中断进行控制输出之前录制好的告警语音信息。其电路图如图7所示。

2.6 串口调试电路
本系统硬件除了设计了各个功能电路外,还针对硬件交互以及随后在电脑端进行控制信息打印等调试应用,设计了基于RS232串口的调试电路,将DB9串口头通过MAX3232双向转换芯片与BF609的UART1引脚进行相连接,完成TTL电平到RS232电平的互相转换。其电路原理图如图8所示。

3 样机研制与测试
本系统硬件平台经过原理图设计、PCB布板以及加工焊接,已经研制完毕,其实物图如图9所示。

通电后进行NOR FLASH引导加载,使用摄像头采集电脑上事先录制好的基于Carsim汽车仿真软件模拟的道路行车视频,然后通过PPI接口传输给BF609微处理器,经过处理后显示到4.3寸TFT液晶显示屏上,视频显示流畅,达到预期的硬件功能设计目标。测试如图10所示。

4 结论
针对汽车追尾引起道路交通事故的安全问题,基于ADSP-BF609 Blackfin处理器研究了汽车前向防撞预警系统,并详细描述了系统的硬件平台架构和各个模块电路设计。研制了样机并进行了测试,结果表明硬件设计达到预期目标,为汽车高级驾驶辅助系统领域的研究和开发提供了硬件平台。
参考文献:
[1]李都厚,刘群,袁伟,等.疲劳驾驶与交通事故关系[J].交通运输工程学报,2010,10(02):104-109.
[2]王大兴.汽车主动安全系统现状与发展趋势分析[J].汽车电器,2016(06):39-42.
[3]顾伟璐,罗文华,陈安柱.汽车主动安全技术和产品的现状及发展趋势[J].河北农机,2015(12):45-46.
[4]陈立娇,许勇.基于传感器的汽车主动安全设计[J].传感器与微系统,2016,35(09):106-109.
[5]刘征宇,吴丽红.基于ADSP-BF609的驾驶员疲劳检测系统研究[J].科技创新与应用,2016(13):20-21.
[6]王振立,李博,彭宝新.基于ARM的TFT-LCD显示系统设计[J].计算机测量与控制,2014,22(01):257-260.
本文来源于《电子产品世界》2018年第6期第36页,欢迎您写论文时引用,并注明出处。






评论