汽车电子电路设计图集锦 —电路图天天读(223)

随着汽车工业的发展,汽车上的电子控制系统数量呈指数增长。以ECU为核心的车载电子控制系统逐步取代了被动器件和机械系统,同时也完成了大多数测量、驱动和控制的功能。由于新型车载电子控制系统在车辆应用中的增加,导致对电源负载以每年约100W的速度增加。当前所面临的最大挑战是在相同的电池电源条件下,找到新的方法来保证汽车电子设备的数量及功能的不断增加。故在实际应用中需要MCU的功耗持续降低。
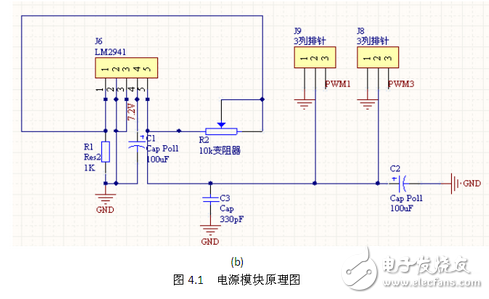
本文引用地址:https://www.eepw.com.cn/article/201710/369041.htm汽车电源电子电路图
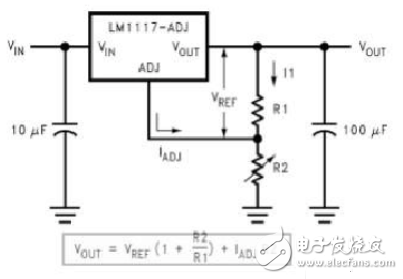
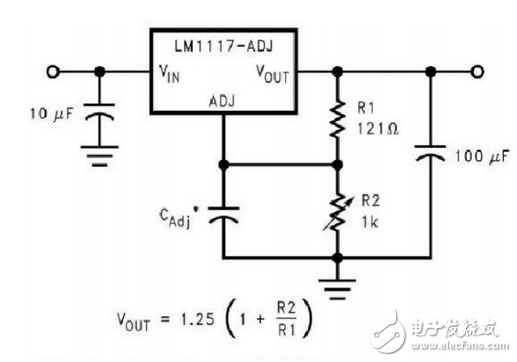
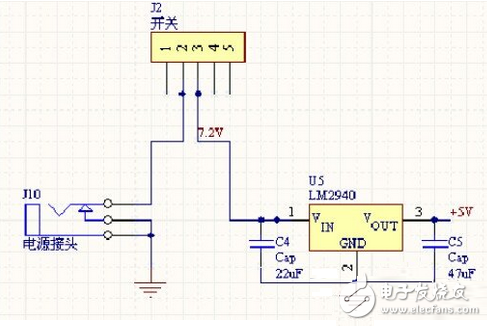
LM2940: 5V,压差0.5V 选择了2940这种串联型线性稳压电源芯片,它具有纹波小、电路结构简单的优点,用其为单片机、激光传感器和编码器供电;LM1117-ADJ:舵机的6V电压;LM1117-3.3:无线模块的3.3V电压
2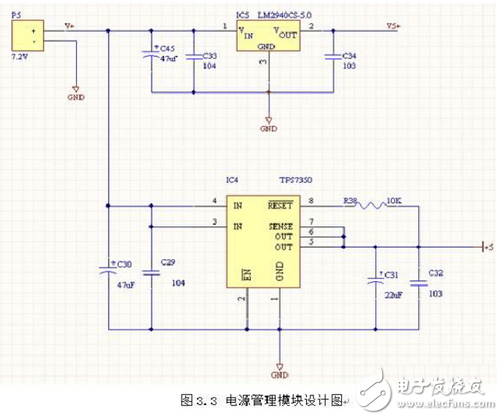
LM2940:5V LM1117-ADJ:舵机的6V电压
使用智能车竞赛统一配发的标准车模用7.2V 2000mAh Ni-cd供电,而单片机、激光传感器、光电编码器等均需要5V电源,伺服舵机(包括前轮转向舵机和后轮刹车舵机)的额定工作电压为6V,直流电机可直接 用7.2V电池直接供电。 5V稳压电源用于单片机、激光传感器模块、光电编码器模块供电。
电子发烧友《汽车电子特刊》,更多优质内容,马上下载阅览
实验证明,用LM2940搭建成的5V稳压电路[给这些模块供 电,能稳定地实现功能,且各个模块不会互相干扰,整个电路简单实用。 舵机稳压电源由LM2941组成的稳压电路提供,其输出电压可调(通过调节图中的10k电位器)
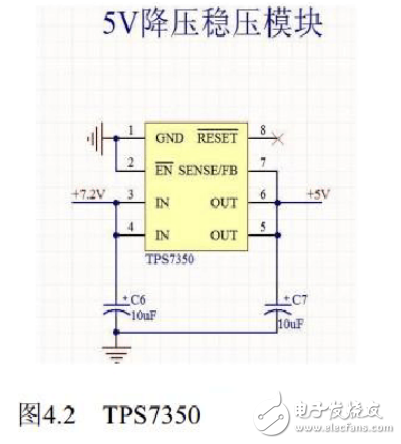
由于整个系统中+5V 电路功耗较小,为了降低电源纹波,考虑使用线性稳压电路。另外,后轮驱动电机工作时,电池电压压降较大,为提高系统工作稳定性,必须使用低压降电源稳压芯片,常用的低压降串联稳压芯片主要有2940、1117等等。2940 虽然压降比1117 更低,但是纹波电压较大。相比之下,1117 的性能更好一些,具有输出电压恒定,压降较低的优点,但是其线性调整工作方式在工作中会造成较大的热损失,导致电源利用率不高,工作效率低下。 TPS7350 是微功耗低压差线性电源芯片,具有完善的保护电路,包括过流,过压, 电压反接保护。使用这个芯片只需要极少的外围元件就能构成高效稳压电路。与前两种稳压器件相比,TPS7350 具有更低的工作压降和更小的静态工作电流,可以使电池获得相对更长的使用时间。由于热损失小,因此无需专门考虑散热问题。
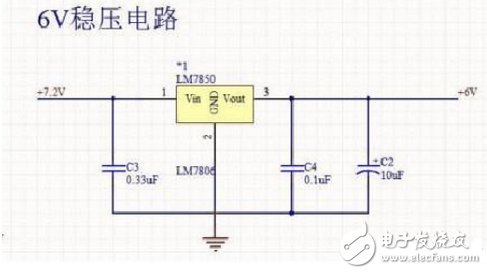
LM7806是6V稳压芯片,这个芯片的选定是专门为本次车模的舵机而设计的,之前A车模的舵机一般供电都是电源电压,但是根据B车模舵机容易损毁的特点,必须将供电的电压值降低,因此选定了LM7806作为6V稳压芯片。
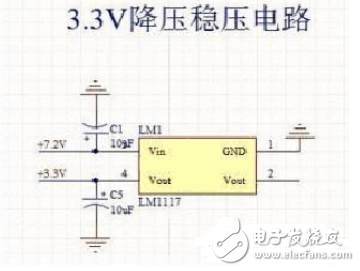
LM1117-3.3V是3.3V稳压芯片,LM1117有两个型号,分别是5V稳压和3.3V 稳压,3.3V稳压芯片主要是用于为加速度传感器MMA7260供电。
电路系统是智能汽车硬件系统的核心,对于本硬件电路系统而言,稳定性是需要优先保证的性能指标,毕竟跑完全程才是取得成绩的前提。在此基础上,还应当综合考虑智能汽车的动力性、重心及电路板的紧凑性等其他指标。
电机驱动模块

电机驱动模块为智能汽车的行驶提供动力,它的性能直接影响到后轮电机的控制性能,包括加速、减速与制动等性能。本文采用MOSFET 驱动芯片加全桥驱动方案,只需合理的选择MOSFET驱动芯片和功率MOSFET 以保证性能即可。电路图如图6 所示。
舵机驱动模块
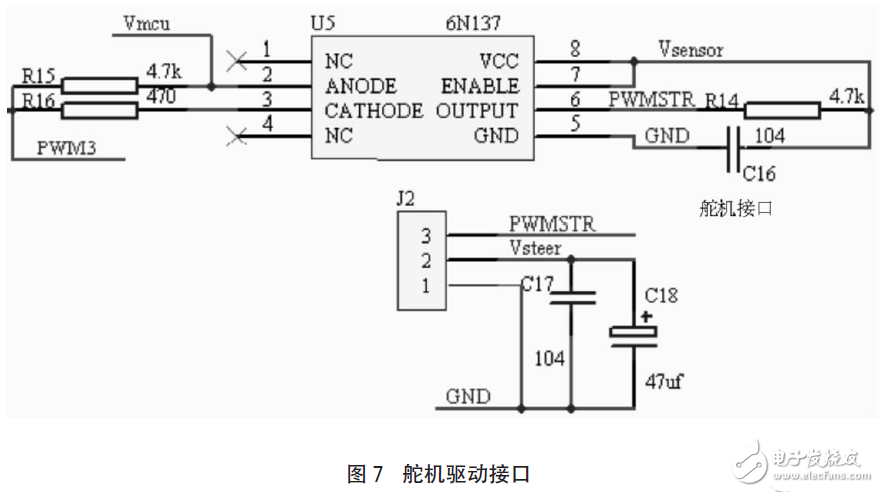
舵机负责智能汽车的转向,舵机模块能否稳定工作直接影响到智能汽车在赛道上高速行驶时的稳定性以及转向时的灵敏度和精确度。舵机工作原理为:舵盘角位由单片机发出的PWM 控制信号的脉宽决定,舵机内部电路通过反馈控制调节舵盘角位。由于自身即为角度闭环控制,而且性能较好,故系统中就不必考虑外加舵机闭环。舵机驱动模块电路如图7 所示。舵机驱动模块同样属于功率部分,用6N137光耦进行信号隔离。
智能车辆是一个涉及多领域的复杂的综合系统,要达到实用的目的,还要进一步深入下研究去,还有许多工作要做。在硬件上还需要解决因摄像头自身精度的差异或其因外部因素丢失数据导致影响智能车正常运行的问题,增强抗干扰能力;在软件上,还需要进一步优化算法,控制系统是智能汽车的核心内容,针对智能汽车的功能需求,对智能汽车控制系统关键模块进行了研究,设计的各模块被应用于“飞思卡尔”智能汽车中,文中各图对智能汽车的研究具有启发作用。
解读NCV70522汽车自适应前照灯系统电路
通常可以通过电机的反电动势(BEMF)来判断电机堵转与否。BEMF 因电机速度、负载及供电电压的不同而变化。传统的步进电机驱动芯片无BEMF 输出,但包含内置堵转检测算法。客户仅可以在寄存器里设定固定的堵转认定临界值,这表示在真实道路条件下所有设定值都必须在工作之前“离线”预设,而不能适配真实工作条件。NCV70522微步步进电机驱动器透过SLA 引脚提供BEMF 输出,这表示它能实时进行停转检测计算,并根据不同条件来调节检测等级。
算法应用
NCV70522是一款微步步进电机驱动器,用于双极型步进电机。这芯片通过I/O 引脚及SPI 接口连接至外部微控制器。NCV70522输出电流有多种选择。它根据“NXT”输入引脚上的脉冲信号以及方向寄存器[DIRCTRL]或“DIR”输入引脚的状态来转动下一个微步。这器件提供从满步到32微步的细分、由SPI 寄存器SM[2:0]来选择的7种步进模式。NCV70522包含SLA 的输出,可以用于堵转检测算法及根据电机的BEMF 来调节转矩和速度计算。典型应用电路图如图所示。
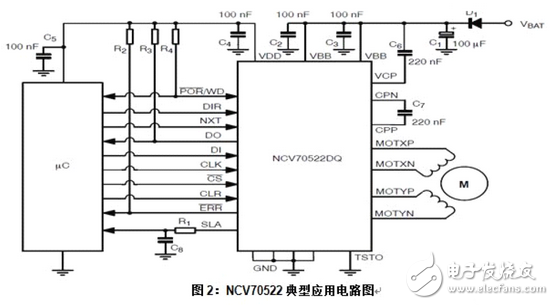
当系统上电时候,微控制器就会初始化,NCV70522复位。这些动作完成时,线圈电流及步进模式将被设定。然后电机驱动器将启用。NXT 脉冲将被发送实现转动电机。电机转速等于NXT 脉冲频率乘以步进细分模式的值。
一种嵌入式汽车数字仪表电路设计
电源和复位电路设计
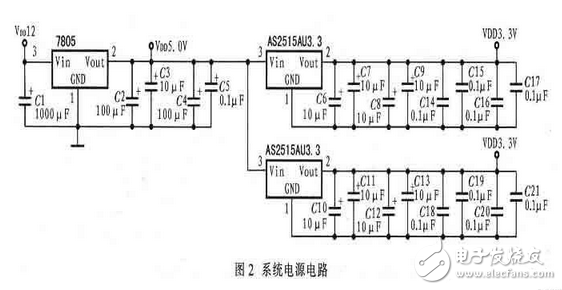
该汽车数字仪表系统采用汽车蓄电池供电,汽车蓄电池的电压约为12 V,而该系统需采用5 V、2.5 V和3.3 V工作电压,S3C44BOX内核工作电压是2.5 V,I/O端口的工作电压是3.3 V,调理电路以及一些驱动器件需用5 V的工作电压。因此,系统选用7805稳压器作为5 V电压转换器,选用AS2515AU2.5和AS2515AU3.3分别作为2.5 V和3.3 V电压转换器。掉电时能够及时存储里程信息,电源地需接一只1 000 μF的电容。掉电时,大电容可以确保S3C44BOX工作一段时间,完成里程信息的存储。复位电路采用专用的复位电路IPM811实现系统稳定启动。图2 为系统电源电路。
车速、水温、油量以及开关量的处理电路设计
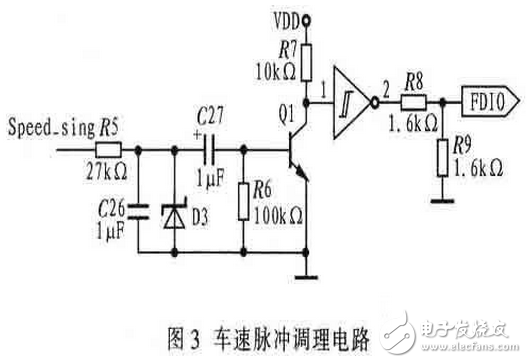
由于汽车大多工作在恶劣环境下,将干扰车速传感器信号,因此在输入至中断端口EINT0前需要对车速脉冲信号进行处理,这里采用RC滤波、三极管放大以及斯密特整形方法调理车速脉冲信号。车速脉冲调理电路如图3所示。
水温、油量信号是电阻信号,须转化为电压信号,再将其电压信号输入至S3C44BOX的AD端口。而其他开关量则经过滤波降压后输入至S3C44BOX的I/O端口。
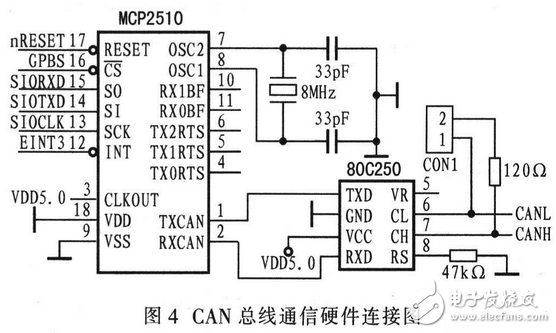
CAN总线通信电路设计
S3C44BOX无SPI接口,但有SIO接口,SIO模块的发送和接收既可在上升沿锁存数据位,也可在下降沿锁存数据位,因此可通过设置 S3C44BOX的SIO模块所对应的寄存器实现上升沿发送数据,下降沿接收数据,从而与MCP2510的SPI总线时序相配合。CAN总线通信电路如图 4所示。
步进电机表头电路等。其中步进电机选用Switec的汽车仪表专用步进电机X15.168,以及专用四通道步进电机驱动器件 X12.017。 S3C44BOX的I/O电平为3.3LVCMOS电平,而X12.017是5VCMOS电平,需采用74LVX4245电平转换。
采用S3C44BOX与嵌入式实时操作系统μC/OS_II设计了一款高精度高、高灵敏度、工作稳定的嵌入式总线汽车数字仪表。 S3C44BOX资源丰富、执行速度快,能扩展很多种功能,如IC卡、GPS、黑匣子等;加之嵌入式实时操作系统简化了应用程序,可高效实时地调用系统任务,因此本汽车数字仪表系统能够很好地解决汽车仪表迈向综合信息化的问题。
编辑点评:汽车电子被认为是汽车技术发展进程中的一次革命,提高l了汽车的安全性、舒适性、经济性和娱乐性,目前可分为两大类:一是汽车电子控制装置,包括动力总成控制、底盘和车身电子控制、舒适和防盗系统;二是 车载汽车电子装置,包括汽车信息系统、胎压监测系统、导航系统等。






评论