VR利器惯性动作捕捉系统原理及优缺点解析

目前动作捕捉系统有惯性式和光学式两大主流技术路线,惯性式虽然后于光学式出现,但以其超低廉成本和简便成熟的处理流程,以及完全实时的数据计算和回传机制,成为了更加炙手可热的技术。目前国际上最富代表性的产品是荷兰Xsens公司研发的Xsens MVN惯性式动作捕捉系统以及美国Innalabs公司研发的3DSuit惯性式动作捕捉系统,国内则有诺亦腾、国承万通等公司。
本文引用地址:https://www.eepw.com.cn/article/201710/368066.htm那么惯性式动作捕捉系统是如何正确运用在虚拟现实中的呢?本文将对惯性动捕的工作原理、优势,及其存在的缺点进行解析,希望能与业内人士共同探讨。
| 惯性式动作捕捉系统原理
动作捕捉系统的一般性结构主要分为三个部分:数据采集设备、数据传输设备、数据处理单元,惯性式动作捕捉系统即是将惯性传感器应用到数据采集端,数据处理单元通过惯性导航原理对采集到的数据进行处理,从而完成运动目标的姿态角度测量。
惯性式动作捕捉系统具体是如何实现的?
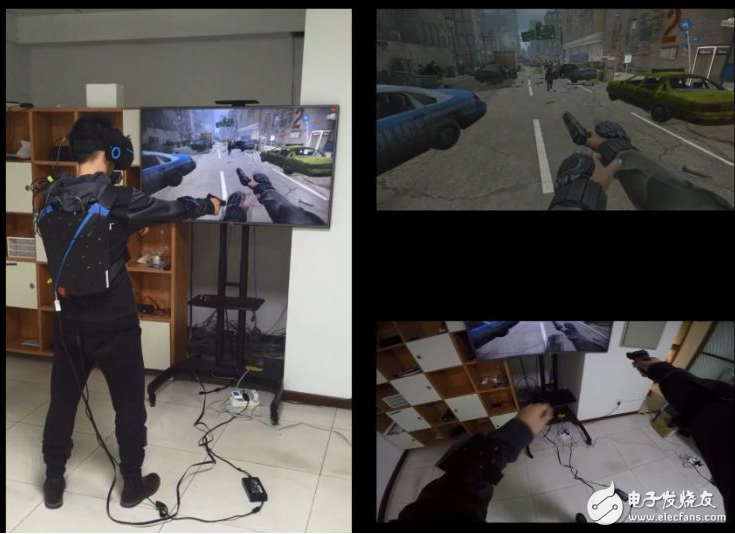
在运动物体的重要节点佩戴集成加速度计,陀螺仪和磁力计等惯性传感器设备,传感器设备捕捉目标物体的运动数据,包括身体部位的姿态、方位等信息,再将这些数据通过数据传输设备传输到数据处理设备中,经过数据修正、处理后,最终建立起三维模型,并使得三维模型随着运动物体真正、自然地运动起来。
经过处理后的动捕数据,可以应用在动画制作,步态分析,生物力学,人机工程等领域。

加速计是用来检测传感器受到的加速度的大小和方向的,它通过测量组件在某个轴向的受力情况来得到结果,表现形式为轴向的加速度大小和方向(XYZ),但用来测量设备相对于地面的摆放姿势,则精确度不高,该缺陷可以通过陀螺仪得到补偿。
陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。它的强项在于测量设备自身的旋转运动,但不能确定设备的方位。而又刚好磁力计可以弥补这一缺陷,它的强项在于定位设备的方位,可以测量出当前设备与东南西北四个方向上的夹角。
在动作捕捉系统中,陀螺仪传感器用于处理旋转运动,加速计用来处理直线运动,磁力计用来处理方向。通俗易懂地讲——
陀螺仪知道“我们是否转了身”,加速计知道“我们运动多长距离”,而磁力计则知道“我们的运动方向”。
在动作捕捉系统中三种传感器充分利用各自的特长,来跟踪目标物体的运动。
目前国际上最富代表性的产品是荷兰Xsens公司研发的Xsens MVN惯性式动作捕捉系统以及美国Innalabs公司研发的3DSuit惯性式动作捕捉系统。MVN是一种全身莱卡套装(也可以采用绑带),使用方便,用户可以在15分钟内设置好整个系统。它采用微型惯性传感器、生物力学模型、以及传感器融合算法,带有 17 个惯性跟踪器,可以在6自由度跟踪身体移动。Xsens MVN 具有快速的周转时间且数据传输稳定、无误,可节约高达 80% 的后期处理时间。

| 惯性式动作捕捉系统优势在哪里?
首先是技术优势
惯性式动作捕捉系统采集到的信号量少,便于实时完成姿态跟踪任务,解算得到的姿态信息范围大、灵敏度高、动态性能好;对捕捉环境适应性高,不受光照、背景等外界环境干扰,并且克服了光学动捕系统摄像机监测区域受限的缺点;克服了VR设备常有的遮挡问题,可以准确实时地还原如下蹲、拥抱、扭打等动作。此外,惯性式动作捕捉系统还可以实现多目标捕捉。
其次是使用便捷的优势
使用方便,设备小巧轻便,便于佩戴。

还有成本优势
相比于光学动作捕捉成本低廉,使得其不但可以应用于影视、游戏等行业,也有利于推动VR设备更快地走进大众生活。
总的来说,惯性式动作捕捉技术有着对捕捉环境的高适应性,它的技术优势、成本优势和使用便捷的优势,使得它在影视动画、体验式互动游戏、虚拟演播室、真人模拟演练、体育训练、医疗康复等领域都有着优异的表现。
| 惯性式动作捕捉系统的劣势,以及,如何解决?
上文中介绍了惯性式动作捕捉系统及其优势,那它有什么劣势,又该如何解决?
一般情况下惯性式动作捕捉系统采用MEMS三轴陀螺仪、三轴加速度计和三轴磁力计组成的惯性测量单元(IMU, Inertial Measurement Unit)来测量传感器的运动参数。而由IMU所测得的传感器运动参数有严重噪声干扰,MEMS 器件又存在明显的零偏和漂移,惯性式动作捕捉系统无法长时间地对人体姿态进行精确的跟踪。只有解决了这一个问题,才能使惯性式动作捕捉系统在VR行业充分发挥作用。
目前,Xsens采用的解决方案如下:
首先对IMU所测得的传感器运动数据做预处理,滤掉原始惯性数据中掺杂的噪声干扰;
然后不断地进行标定和校准,即不断地对各惯性器件进行相应的补偿以解决MEMS器件的零偏和漂移,提高其数据的精确度和可靠程度;
接下来在进行姿态解算,并利用姿态参考系统验证姿态角度数据的精确度,最终实现整个惯性式动作捕捉。
此外,与之不同的是,国内的G-Wearables则采用IK+室内定位技术做主动作捕捉算法,使用惯性式动作捕捉做辅助算法。这套方案中利用室内定位技术对惯性式动作捕捉技术做实时校准,避免了不断校准的麻烦。

那么,什么是IK算法?
首先介绍下IK算法及其在动作捕捉系统中的应用。
IK是Inverse Kinematics的缩写,即反向运动学。
在人体分层结构中,关节和骨骼实际构成了运动链,比如肩关节、肘关节、腕关节及其子骨骼就是一条运动链,是整个人体运动链上的一条分支,身体即是利用运动链对运动进行控制。运动分为正向运动和反向运动。已知链上各个关节旋转角,求各关节的位置信息和末端效应器(end effector)的位置信息,这是正向运动学的问题;而己知末端效应器的位置信息,反求其祖先关节的旋转角和位置,这是就是反向运动学。
反向运动学根据决定运动的几个主关节最终角度确定整个骨架的运动,通常用于环节物体,由不同运动约束的关节连接成环节构成的分级结构骨架。分级结构骨架由许多采用分级方式组的环节链构成,包括分级结构关节或链,运动约束和效应器,由效应器带动所有部分同时运动。但必须遵循特定的等级关系,以便在变换时阻止各个部件向不同方向散开。如:投球动作,只规定出球的起始位置、终了位置和路径,手臂等即跟随关节的转动可按反向运动学自动算出。反向运动学方法在一定程度上减轻了正向运动学方法的繁琐工作,是生成逼真关节运动的最好方法之一。
IK算法如何在动作捕捉系统中应用?
如上文所说,如果己知末端效应器的位置信息,反求其祖先关节(也称父关节)的旋转角和位置,这是就是反向运动学。也就是我们通过室内定位技术,获取末端效应器的位置信息,然后利用IK算法推算出祖先关节的旋转角和位置,从而知道运动者的运动信息,再利用运动信息实现实时动作跟踪显示。
这里所用的室内定位技术是激光定位技术,通过墙上的激光发射器扫描佩戴者佩戴的机身上的位置追踪传感器(即IK算法中的末端效应器),从而获得位置和方向信息。具体来说,这种室内定位技术是靠激光和光敏传感器来确定运动物体的位置。若干个激光发射器会被安置在对角,形成一个矩形区域,这个区域可以根据实际空间大小进行调整。每个激光发射器内设计有两个扫描模块,分别在水平和垂直方向轮流对定位空间发射横竖激光扫描定位空间。运动者身上有光敏传感器,通过光敏传感器接收到激光的时间计算出光敏传感器的准确位置。
通过激光室内定位技术获取传感器的精确位置后,即可利用IK算法反向推算出祖先关节的旋转角和位置,从而知道运动者的运动信息。但是由于激光定位过程中可能存在遮挡问题,比如下蹲、拥抱、扭打等动作。于是应用惯性传感器做补充跟踪,即当出现遮挡情况时, 室内定位技术+IK算法相结合的动作捕捉技术无法完全准确地实现,这个时候利用惯性式动作捕捉技术可做补充。反过来可以利用室内定位技术对惯性式动作捕捉技术做实时校准,不需要另行校准,从而解决遮挡问题的同时,也避免了惯性式动作捕捉无法长时间精确工作的弊端。
以上详细解析了惯性式动作捕捉系统的原理,优劣势等方面的内容,动作捕捉系统作为VR界的隐形钥匙,越来越多地被人们所关注。相信随着VR行业的迅猛发展,会有更多的更好的解决方案问世,笔者跟大家一样,期待有一天精准的VR动作捕捉技术可以走入我们的日常生活。


评论