直流伺服电机调速控制系统解析,直流伺服电机的调速控制方式

直流伺服电机速度控制单元的作用是将转速指令信号转换成电枢的电压值,达到速度调节的目的。现代直流电机速度控制单元常多采用晶闸管(可控硅,SCR)调速系统和晶体管脉宽调制(PWM)调速系统。
本文引用地址:https://www.eepw.com.cn/article/201710/367420.htm 
调速的概念有两个方面的含义:
(1) 改变电机转速:当指令速度变化时,电机的速度随之变化,并希望以最快的加减速达到新的指令速度值;
(2) 当指令速度不变化时,电机的速度保持稳定不变。
为调节电机转速和方向,需对直流电压的大小和方向进行控制,如何控制?
直流伺服电机速度控制单元的作用:将转速指令信号转换成电枢的电压值,达到速度调节的目的。
直流电机速度控制单元常采用的调速方法:晶闸管(可控硅)调速系统;晶体管脉宽调制(PWM)调速系统。
1、晶闸管调速系统
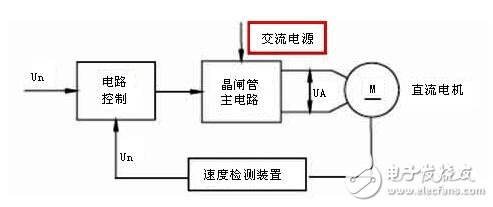
在交流电源电压不变的情况下,当改变控制电压Un* 时,通过控制电路和晶闸管主电路改变直流电机的电枢电压Ud,得到控制电压Un*所要求的电机转速。电机的实际电压Un作为反馈与Un*进行比较,形成速度环,达到改善电机运行时的机械特性的目的。
晶闸管调速系统主电路采用大功率晶闸管。大功率晶闸管的作用:
(1)整流。将电网交流电源变为直流;将调节回路的控制功率放大,得到较高电压与较大电流以驱动电机。
(2)逆变。在可逆控制电路中,电机制动时,把电机运转的惯性能转变为电能,并回馈给交流电网,实现逆变。
为了对晶闸管进行控制,必须设有触发脉冲发生器,以产生合适的触发脉冲。该脉冲必须与供电电源频率及相位同步,保证晶闸管的正确触发
主回路由大功率晶闸管构成的三相全控桥式反并接可逆电路,分成二大部分(Ⅰ和Ⅱ),每部分内按三相桥式连接,二组反并接,分别实现正转和反转。
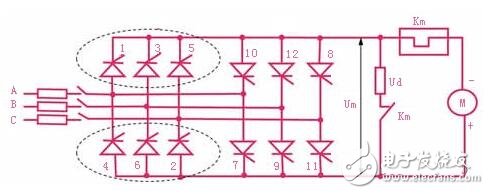
各有一个可控硅同时导通,形成回路。为了保证合闸后两个串联的晶闸管能够同时导通或电流截止后再导通,必须对共阳极组的1个晶闸管和共阴极组的1个晶闸管同时发出触发脉冲。
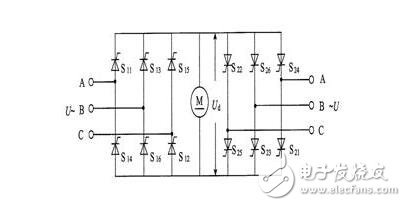
晶闸管调速系统采用的是大功率晶闸管,它的作用有两个,一是用作整流,将电网交流电源变为直流;二是在可逆控制电路中,电机制动时,把电机运转的惯性能转变为电能,并回馈给交流电网,实现逆变。为了对晶闸管进行控制,必须设有触发脉冲发生器,以产生合适的触发脉冲。晶闸管的整流电路有许多种,在数控机床中最常用是三相桥式反并联可逆电路。
如图所示的就是三相桥式反并联可逆电路。其由12个可控硅大功率晶闸管组成,晶闸管分两组,S11 ~S16为一组, S21 ~S26为一组。每组按三相桥式联接,两组反并联,分别实现正转和反转。反并联是指两组变流桥反极性并联,由一个交流电源供电。每组晶闸管都有两种工作状态:整流和逆变。一组处于整流工作时,另一组处于待逆变状态。在电机降速时,逆变组工作。
三相全控桥式电路的电压波形如图所示。图上所标出的晶闸管触发角 α为π/3。晶闸管以π/3的间隔按次序开通,每6个脉冲电机转1转。由于晶闸管 以较快的速率被触发,所以流经电机的电流几乎是连续的。
其工作过程如下:当ωt=π/6+α时,S11开通而在此之前S16已被开通了。因此,当A相电压波形在π/6+α<ωt<π/6+α+π/3区间时,晶闸管S11和S16导通,电机端子与A 相和B相接通,故Ud=UAB。当ωt=α+π/3+π/6时,晶闸管S12开通,电流流经S12,而S16由于受反向偏置而关断(自然或电网换向)。这时S11和S12导通,电机两端电压Ud=UAC。就这样,每隔π/3又有一只晶闸管被开通,之后就重复上述过程。
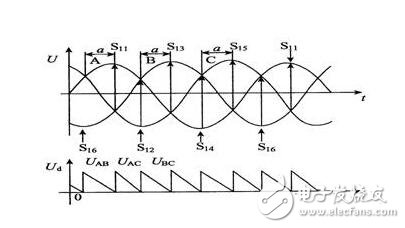
由波形图可见,只要改变触发角α的值,则就可以改变电机电压的输入值,进而调节直流电机电枢的电流值,达到调节直流电机速度的目的。
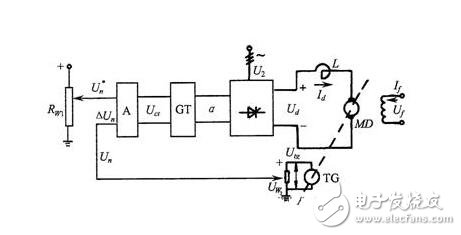
在图中,RW1为转速定位器U+n,为转速偏差电压,Un为转速反馈电压,ΔUn为反馈偏差电压,A为比例放大器,Uct为触发控制电压,GT为晶闸管的触发控制装置。
系统的工作情况及自动调速过程如下:
当系统在某一较小的转速给定电压U+n作用下启动时,开始一瞬间电机并未转动,故转速反馈电压Un=0,反馈偏差电压ΔUn=U+n,通过放大器后,输出较大的Uct,触发器输出的触发角α将由起始状态时的90o下降,整流器输出电压也由Ud=0上升到某一较大的值,电动机在这一电压作用下(电流不超过允许值时)启动运转。随着转速的上升,反馈电压Un上升,则转速偏差电压ΔUn下降,Uct随之下降,α上升,整流器输出电压Ud也下降,电动机转差率也下降,直到转速n接近给定转速,即反馈电压Un接近,电机即平稳运转。如前所述,电机转速只能接近给定转速,偏差大小与放大倍数紧密相关。但这种系统从原理上说就是有偏差的,故称为有差调速系统。
晶闸管供电转速电流双闭环直流调速系统
前面所述的转速负反馈单闭环调速系统实际上是不能用于数控机床进给系统,对于数控机床上要求高的调速系统,则要求快速启动、制动,动态速降要小等,通常采用转速电流双闭环系统。
转速电流双闭环调速系统如图所示。为了实现转速和电流两种反馈分别起作用,系统中设置了两个调节器,分别对转速和电流进行调节,两者之间实行串级联接。
2、晶体管直流脉宽(PWM)调速系统
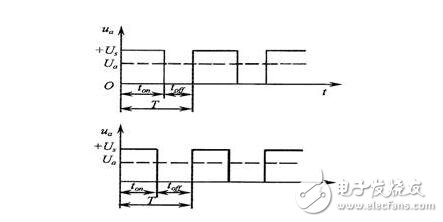
(1)原理:利用大功率晶体管的开关作用,将直流电压转换成一定频率的方波电压,加到直流电动机的电枢上;通过调整控制方波脉冲宽度来改变电枢的平均电压,从而调节电机的转速。
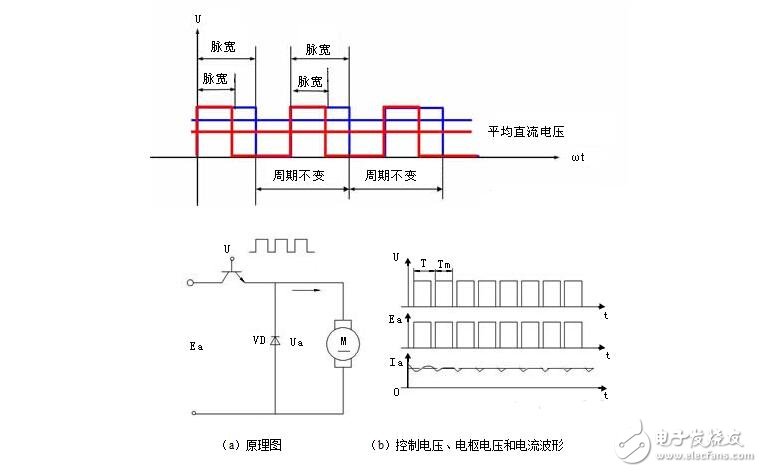
直流电机电压的平均值
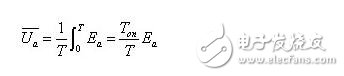
其中,T为脉冲周期,Ton为导通时间
特点:控制电路简单,不需附加关断电路,开关特性好。广泛应用中、小功率直流伺服系统。
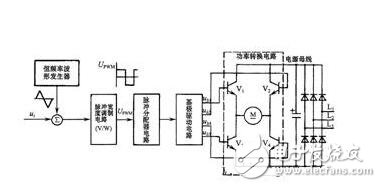
(2)PWM系统的组成
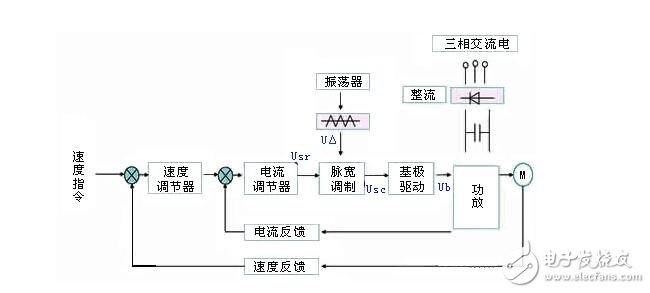
USr——速度指令转化过来的直流电压;
U△——三角波;
USC——脉宽调制器的输出(USr+U△);
Ub——调制器输出的经脉冲分配、由基极驱动转换过来的脉冲电压。
控制回路:速度调节器、电流调节器、固定频率振荡器及三角波发生器、脉宽调制器和基极驱动电路组成。
区别:与晶闸管调速系统比较,速度调节器和电流调节器原理一样。不同的是脉宽调制器和功率放大器。
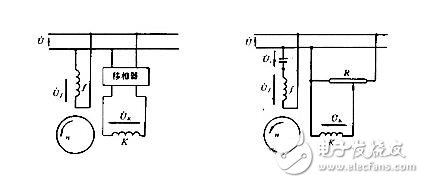
PWM系统的脉宽调制器
作用:将电压量转换成可由控制信号调节的矩形脉冲,为功率晶体管的基极提供一个宽度可由速度指令信号调节的脉宽电压。
组成:调制信号发生器(三角波和锯齿波两种)和比较放大器。
晶体管调速系统主电路
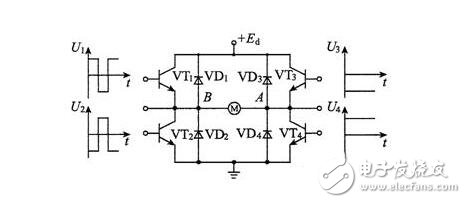
开关功率放大器是脉宽调制速度单元的主回路,其结构形式有两种,一种是H型(也称桥式) ,另一种是T型。每种电路又有单极性工作方式和双极性工作方式之分,而各种不同的工作方式又可组成可逆开关放大电路和不可逆开关放大电路。
图示为广泛使用的H型开关电路的工作原理图,它是由四个二极管和四个功率管组成的桥式回路。直流供电电源+Ed由三组全波整流电源供电。脉宽调制器输出的脉冲波u1、u2、u3、u4经光电隔离器,转换成与各脉冲相位和极性相同的脉冲信号U1、U2、U3、U4,并将其加到开关功率管VT1~VT4的基极。当电机正常工作时,在0《t《t1的时间区间内,U2、U3为高电平,功率晶体管 VT2、VT3导通,此时电源、+Ed加到电枢的两端,向电机供电,电流方向是从电源+Ed经VT3→电机→VT2→回到电源。在t1≤t《t2时间段U1、U3均是低电平,VT1和VT3截至,+Ed被切断。而此时U2仍为高电平,此时,由于电枢电感的作用,电流经VT2和续流二极管VD4继续流通。在t2≤t《t3时,U2、U3又同时为正,+Ed又经VT2和VT3加至电机两端,电流继续流通。在t3≤t《T时,U2、U4同时为负,电源又被切断,而U3为正,所以电枢电流经VT3和VD1续流,如此往复循环。主回路得到的电压UAB是在+Ed和O之间变化的脉冲电压。
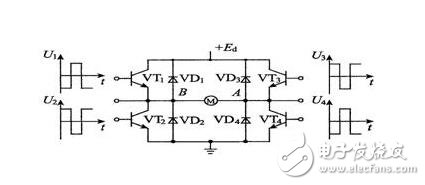
双极性和单极性的电路原理图是一样的,所不同的是右边两个管子的驱动信号不同。
晶体管直流脉宽(Pulse Width ModulaTIon,PWM)调速系统
(1)直流PWM伺服驱动装置的工作原理
PWM驱动装置是利用大功率晶体管的开关特性来调制固定电压的直流电源,按一个固定的频率来接通和断开,并根据需要改变一个周期内接通与断开时间的长短,通过改变直流伺服电动机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。
PWM控制的示意图如图所示,可控开关S以一定的时间间隔重复地接通和断开,当S接通时,供电电源U通过开关S施加到电动机两端,电源向电机提供能量,电动机储能;当开关S断开时,则中断电动机的能量供给。在开关S断开期间电枢电感所储存的能量则通过续流二极管VD使电动机电流继续流通。
假如加在电机两端为图所示的电压波形,则电机所获得的平均电压即为:
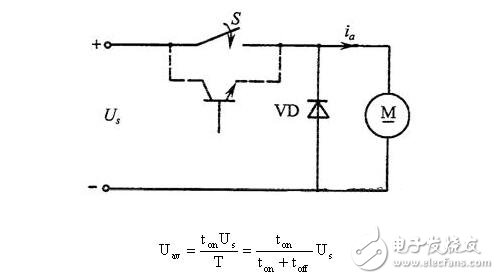
有式知:改变ton和toff即可改变转速,但这必须有相应的装置才能实现。图示的即为一种PWM驱动装置系统原理框图。
由图知:PWM驱动装置的控制结构可分为两大部分:从主电源将能量传递给电动机的功率转换电路以及控制电路。功率转换电路可为H型、T型功率放大电路;控制电路通常由恒频率波形发生器、脉冲宽度调制电路、基极驱动电路、保护电路等基本电路组成。
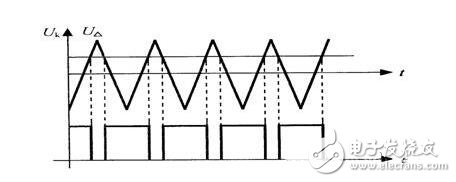
当三角形波电压UΔ 与直流电压Uk送入放大器后,如三角波高于控制电压时,输出为“空”;反之,输出为“占”,改变控制电压Uk就可以改变占空比。其输出波形如图。
脉冲分配电路它根据功率转换电路工作制式,对V/W变换的信号进行适当的逻辑变换,分配给基极驱动电路以满足功率转换电路工作时通、断时序脉冲的电压要求。
3、全数字直流调速系统
在全数字直流调速系统中,仅功率转换组件和执行组件的输入信号和输出信号为模拟信号,其余的信号都为数字信号,由计算机通过算法实现。
计算机的计算速度很高,在几毫秒内可以计算出电流环和速度环的输入、输出数值,产生控制方波的数据,从而控制电机的转速和转矩。全数字调速的特点是离散化,即在每个采样周期给出一次控制数据。
在一个采样周期内,计算机要完成一次电流环和速度环的控制数据的计算和输出,对电机的转速和转矩控制一次。






评论