基于LPC2138的红外摄像机系统

现行普通摄像机在得到视频信号后,经LM1881提取水平和同步信号并送入字符叠加芯片UPD6453GT。UPD6453GT产生的字符信号与视频信号一起送到NJM2264D叠加,就可以形成叠加了字符的视频信号。根据需求,只可以实现中文字符和英文字符的叠加。本文介绍的是一种基于LPC2138 ARM7作为MCU 来实现一款红外摄像机的方案,能实现视频信号的水平/垂直分离、字符叠加,还介绍了各芯片的功能及云台等方面的内容。
1 系统硬件设计
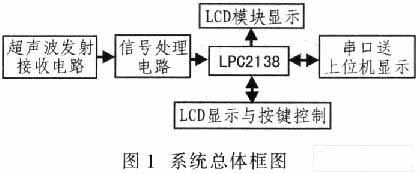
基于LPC2138 ARM7实现的红外摄像机的系统结构框图如图1,其主要硬件包括LPC2138 LM1881、UPD6453、JNM2266、A3967等。
LPC2138是PHILIPS公司的一款32/16位ARM7TDMI-STM CPU的微控制器,并带有512 KB的嵌入高速Flash存储器。128位宽度的存储器接口和独特的加速结构,使32位代码能够在最大时钟速率下运行;多个串行接口,包括2个标准UART、2个高速I2C接口;9个边沿或电平触发的外部中断引脚,通过片内PLL可实现最大为60 MHz的CPU操作频率。CPU操作电压范围为3.0~3.6 V(3.3 V±10%),I/O口可承受5 V的最大电压。
LPC2138电路图如图2所示,主要实现以下功能:
(1)使用LPC2138的两个串口,可以用一个串口与上位机通信,另一个与摄像机通信。所有上位机发送的协议命令先经LPC2138解析后,控制云台或直接发往摄像机。
(2)利用两个I2C口扩展两片EEPROM,一片用于存储汉字的点阵码,用于叠加汉字字符;另一片用于存储用户的设置信息,如看守位、预置位、巡视组数据等。
(3)利用LPC2138一个外部中断,检测步进电机的过零点,用于初始化时的自学习和运行时的位置显示校正。
(4)利用LPC2138的PWM功能发送脉冲,驱动A3967/A3977等步进电机的驱动芯片。LPC2138的PWM容易控制,可以根据速度设定编写PWM的发出脉冲。
(5)利用LPC2138的实时时钟实现日历功能,并将时间显示在CRT上。还可以利用LPC2138的时钟中断功能控制摄像机的运行。
(6)需要使用一个光偶检测摄像机是否过零点,此信号还需经施密特触发器整形后作为LPC2138的外部中断。
LM1881可以将复合视频信号中的垂直同步信号和水平同步信号分离出来。分离出来的信号输入到UPD6453GT,作为字符信号的同步信号。具体电路如图3所示。
UPD6453是NEC公司推出的专用字符叠加芯片,它的主要特点是显示编辑功能强,可以在屏幕上显示12行24列的字符,每个字符为12×18点阵,字符的大小、闪烁频率可以根据需要进行调整,同时为了达到显示的多样性,屏幕的背景色、字符的边缘色以及字符本身的颜色也可以进行修改。UPD6453内部不但提供240 B的字模,而且还提供16 B的RAM空间以供用户填入自定义字符,这就为汉字显示提供了可能。UPD6453字节的背景色、边缘色以及字符本身的背景色均有7种,在颜色控制上,为用户提供了更多的选择。图4为UPD6453电路图。控制命令主要有:
(1)显示控制:确定是否允许显示字符、字符的闪烁频率,及控制LC振荡的停振和起振。
(2)背景控制:确定背景的类型(无背景、字符边缘背景、字符块背景、全屏幕背景)。
(3)背景颜色控制:确定背景的颜色(有7种颜色选择)。
(4)视频 RAM复位:此时晶振起振,视频RAM写模式,字符的颜色、大小等为默认设置。
(5)显示块位置控制:用来确定12行24列的字符显示块离屏幕最上端、最左端的距离。
(6)显示字符行、列地址控制:确定字符在12行24列的显示块中的行列位置。
(7)字符大小、平滑控制:确定每一行字符的显示大小,以及用多倍显示时是否采用字符的平滑措施。
(8)字符RAM写地址控制:UPD6453内部提供16个字符的RAM空间,每个字符为12×18点阵。该命令用来确定将点阵数据写入RAM空间中第几个字的第几行(一共18行),写完一行,行地址自动加1,写完一个字,字地址自动加1。
(9)字符RAM写数据控制:确定需要写入RAM空间的一行12个点的点阵数据。
(10)显示字符控制:确定芯片UPD6453的256个字符(包括固化的240个字符以及16个自定义字符)中哪个字符送出显示,以及该字符的显示颜色和是否闪烁。
NJC2266是使用4.75~13 V电压的高性能视频开关;内部6 dB放大器电路;3输入,1输出;内部灌入芯片箝位功能(VIN1),可以输入视频信号;内部亮度信号控制功能(VIN2,VIN3),用来连接两个电位器控制,分别控制字符边框和字符的亮度。具体的电路图如图5所示。
A3967采用Allegro公司的A3967SLB芯片。该芯片驱动能力可达30 V、±750 mA,它适合双极步进电机使用,与需要L298拖动的L297芯片相比,实现更方便。若负载更大,则可选用3977,其驱动能力为30 V、±2.5 A。A3967/A3977电路图如图6所示。A3967SLB驱动步进电机可以达到8细分驱动,这款24引线的SOIC,采用该公司EasyStepper接口,将8条控制线路减少为2条(步长和方向),其内嵌的转换器可以实现对步进电机的控制,只要简单地输入控制电机的脉冲即可,不需要环形分配器、复杂的相变编程和高频控制。A3967SLB的内部电路保护,包括利用磁滞的过热停止保护、低电压锁定和过流保护,也不需外接功率驱动部分。A3967SLB还具有混合、快速和慢速电流衰减模式选择,内置PWM电流控制,同步整流,低输出阻抗的 DMOS电源输出。这种驱动方式设计简单,调试方便,运行可靠,对硬件要求较低。A3967内部的PWM电流控制:每一个H桥都有一个固定截止时间的PWM电流控制电路,从而将负载电流限制在一个最高值之内。开始进行工作时,对角线上的一对源接受DMOS处于输出状态,电流流经电机绕组和SENCE脚所接的电流取样电阻。当取样电阻上的压降等于D/A的输出电压时,电流取样比较器将PWM锁存器复位,从而关闭源驱动器(上桥)进入慢衰减模式;或同时关闭源接受驱动器(下桥)进入快衰减模式;或者混合模式,使之产生环流或电流回流至源端。该环流(回流)将持续衰减到截止时间为止,然后,产生下一次的PWM循环。另外,在给A3967/3977布线时,必须考虑地平面和电阻Rs的布线。
恒流大功率红外灯的驱动设计OCP2030是一款BUCK型DC-DC;具有2%的反馈电压精度;输入电压较宽,最高可达20 V;最大3 A的电流,很容易实现5 W的LED驱动。SOP8封装;图7中R的选择原则是:要求是大功率电阻,如0.5 W或1 W,封装形式是2012或更大。
如果不能满足要求,还可以采用多个小功率的LED并联。为满足红外摄像机黑白转换,可以用OCP2030的4脚即FB来控制整个芯片的运行。LED中流过的电流为:
Iled=0.5 V/R(A)
如R选0.68 Ω,Iled=0.7 A
2 软件设计
软件的设计应该基于模块式设计,以便以后扩充功能,增加摄像机的控制协议。同时应该考虑CPU的时钟频率。步进电机的驱动以及显示,通信控制等都需要及时处理。
本文介绍了一款红外摄像机的方案和电路图,在此基础上可以扩充其功能,添加不同的模块,如更换MCU实现网络摄像机等。



评论