
超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而用于距离测量。利用超声波检测往往较迅速、方便、计算简单、易于实时控制,且测量精度能达到工业实用要求,因此在移动机器人的研制中得到广泛应用。移动机器人要在未知和不确定环境下运行,必须具备自动导航和避障功能。超声波传感器以其信息处理简单、速度快和价格低的特点广泛用作移动机器人的测距传感器,实现避障、定位、环境建模和导航等功能。
2 系统总体设计方案
2.1 超声波测距原理
2.1.1 超声波发生器
超声波为直线传播方式,频率高,反射能力强。空气中其传播速度为340 m/s,容易控制,受环境影响小。因此采用超生波传感器作为距离探测的“眼睛”,可用于测距领域的超声波频率为20~400 kHz的频段,空气介质中常用为40 kHz。
2.1.2 压电式超声波发生器原理
压电式超声波发生器实际上利用压电晶体的谐振工作。超声波发生器内部结构有2个压电晶片和1个共振板。当它的两电极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将发生共振,并带动共振板振动,产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电品片振动,将机械能转换为电信号,这时就成为超声波接收器。
2.1.3 超声波测距原理
超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,碰到障碍物就立即返回。超声波接收器收到反射波立即停止计时,超声波在空气中的传播速度为340 m/s。系统中,超声波测距采用检测超声波往返时间的方法。由于时间长度与声音通过的距离成正比,当超声波发射极发出一个短暂的脉冲波时,计时开始;当超声波接收端接收到第1个返回波脉冲后,计时立即停止。根据计时器记录的时间t,可计算发射点距障碍物的距离(s),即:s=340t/2。这就是所谓的时间差测距法。
2.2 系统总体设计
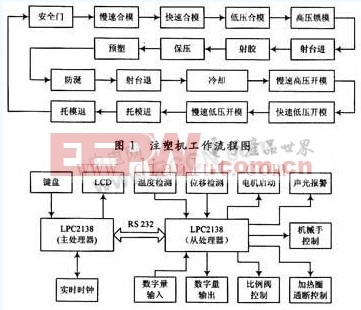
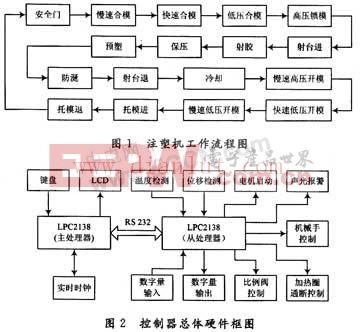
该系统采用μC/OS-lI操作系统,系统将软件划分为4个功能模块:回波A/D采集模块, LED显示和按键处理模块,LCD显示模块,报警、存储及串口处理模块。其中,回波A/D采集模块用于采样,保存实时数据;LED显示和按键处理模块用于处理采样数据,并将其转换成有实际意义的参数:LCD显示模块是将各种参数在LED显示;而报警、存储及串口处理模块主要是实时处理相应数据。图1为系统设计总体框图。

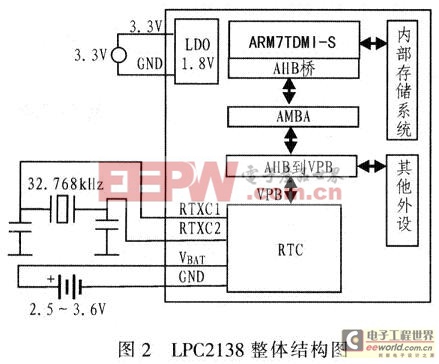
3.1 LPC2138微控制器简介
LPC2138内嵌512 KB的高速Flash存储器和32 KB的RAM,具有丰富的外设资源:2个32位定时器(带捕获、比较通道),2个10位8路A/D转换器,1个10位D/A转换器,PWM通道,47路 GPIO,9个边沿或电平触发的外部中断,具有独立电源和时钟的RTC,多个串行接口(UART、I2C、SPI、SSP)。它内含向量中断控制器,可配置中断优先级和向量地址.片内Boot装载程序可实现在系统应用编程(ISP/IAP),通过片内PLL可实现60 MHz的CPU操作频率,具有空闲和掉电2种低功耗模式,并可通过外部中断唤醒,图2为LPC2138的整体结构图。
超声波发射电路是南超声波发射器T和PWM产生的40 kHz频率信号、驱动(或激励)电路等组成。该系统设计采用ARM中的PWM模块产生高精度的40 kHz的频率信号,然后通过南74HC00等组成的驱动电路,最后将发射信号送到超声波发射器T。对于放射探头T,选用发射频率为40kHz的一种,该类型现在应用较普遍,电路也简单,只需给发射端40 kHz的脉冲,发射探头即不断发送超声波。具体硬件电路如图3所示。



评论