锂离子电池管理芯片的研究及其低功耗设计 — 锂离子电池管理芯片的功能设计及功耗优化(二)

3.3锂离子电池管理芯片的功耗优化
本文引用地址:https://www.eepw.com.cn/article/201706/348226.htm从上面的分析可以看出,此芯片是一个连续工作的数模混合系统,同时又以被监测的锂离子电池为供电电源,因此必须能够在电池电压的整个变化范围内正常工作。在实现电路功能并满足检测精度的前提下,为了尽可能延长电池寿命,降低电路功耗成了另外一个重要的设计指标。由于控制逻辑部分属于数字电路,其静态功耗几乎可以忽略,所以在优化逻辑电路动态功耗的前提下,如何降低模拟电路的静态功耗并且限制低电压下系统功耗成了设计重点。
3.3.1 DPM技术在数模混合信号系统中,同样可以采用数字电路的DPM技术来进行功耗优化。即根据负载和任务的变化,及时关掉暂时不工作、也不影响整个系统输出的电路部分,从而减小系统功耗。和传统DPM理论相比,混合信号电路中的控制对象不再是数字电路而是模拟电路,这样也能够更有效地节省系统静态功耗。然而,目前的DPM理论还大多数集中在纯数字电路系统、或是多媒体、无线通信领域。面向电池管理芯片的混合信号电路DPM理论还未见报道。
一般地,系统受外界负载信号的激励做出响应,为了响应任务而需要消耗能量。由于负载信号的到来相互间没有联系,没有任何特征,一般也不遵从一定的概率分布。在不能预知负载特性的情况下,系统必须能检测并且判断负载性质,根据合理的DPM策略来决定系统内部模块的工作状态。因此,可以先从功耗管理器(Power Manager, PM)的系统抽象结构入手,再进一步研究管理器的内部组成及实现。
1 PM抽象结构
按照相应功耗管理实现的物理层次,可以分为内部PM和外部PM两类。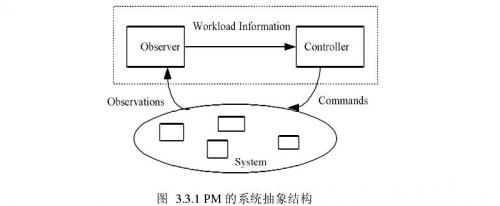
图3.3.1给出了外部功耗管理结构。图中,在原有工作系统外部,增加了功耗管理部分(虚线框中所示),其中,检测电路(Observer)收集负载信息,控制器(Controller)产生强制功耗状态变化的控制信号。控制器可以是一个可编程的微控制器,或者是一个状态机,它既可以位于内部逻辑中,有时也可以作为一个单独的微处理器存在。图3.3.1所示的外部PM一般由软件实现,由于它能对系统和负载进行准确的实时检测,所以可以采用较复杂的功耗管理策略,功耗优化效果较佳,常用于较为复杂的系统如嵌入式系统。外部PM的缺点是速度较慢,增加了外部与系统之间接口的设计复杂程度,软硬件综合代价未必最佳。内部管理器则一般由系统内部硬件实现,因此功耗管理速度较快,对外接口简单,但是在检测整个系统的工作状态时有一定的局限性,通常只能采用较为简单的DPM策略。
DPM工作流程图如图3.3.2所示。从图中可以清楚地看到,当系统启动后,由检测电路来检测系统负载的状态和性质,然后根据不同的策略估算功耗状态,如果不需要关断模块则继续检测负载,如果需要功耗管理,则由控制器产生用于关断相应模块的控制信号。
综上所述,一个DPM体系的选择和实现,显然首先需要建立系统功耗或者性能以及负载的模型,然后再根据相应的判决策略产生控制信号。下面,就将从PM实现的层次,从功耗建模、判决策略、体系实现这三个方面分别讨论。
2功耗建模
功耗建模可以借鉴DPM中实时嵌入式系统的建模方法,将电池管理芯片定义为普通的功耗管理系统。这个系统由一系列相互影响的受功耗管理器控制的功耗管理组件(Power Management Component, PMC)组成。这种定义是普遍意义上的,在系统级层次,PMC可以是芯片中的一个系统功能模块。为了实现更有效的DPM策略,并不需要了解PMC内部结构,只需要关心它们与外界如何相互作用。这种方法将有助于更好地理解PM和PMC之间需要交换怎样的信息。
在设计时,非功耗管理组件的目标仅是在特定的功耗预算下实现性能,而PMC才可以在高性能高功耗和低性能低功耗之间自由地转换,从而达到功耗与性能的折衷。
PMC的一个基本特征是,它有多种功耗模式,且各种模式之间的转换也可能引起延迟或性能下降。模式数量增多虽然可以更精确地控制PMC的状态,使浪费的功耗最小,性能调整达到最佳,但在实际应用中为了不使设计难度过大,以及实现PM的硬件代价过大,一般都要选择适当的PMC功耗模式数。
PMC模型可以由功耗状态机(Power State Machine, PSM)来描述,PSM中的状态即是PMC各种工作模式,模式之间的转换有功耗或延迟。为简化模型,电池管理芯片的PMC的功耗状态可由图3.3.3所示的PSM表征。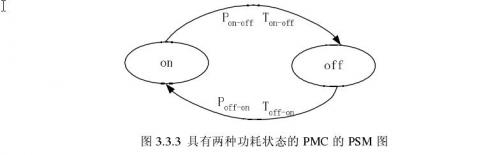
图3.3.3所示的PMC可以有两种状态:一种是ON,此时PMC正常工作,功率消耗正常;另一种是OFF,PMC被关断,功耗较低。功耗状态的转变通常是要以牺牲性能和功耗为代价的。比如,如果进入低功耗状态需要关断供电电源,那么从低功耗状态恢复则通常需要一定的时间,这个延时要用来使电源电压/时钟稳定,或重新初始化系统,或者进行状态的重新存储。简而言之,需要有一定的策略来决定PMC何时、是否值得进入低功耗状态;在复杂的多种功耗状态系统中,则还要选择进入何种低功耗状态。
需要指出的是,系统及内部组件的模型都可以由PSM来描述,但是负载的模型变化相对复杂,比如将从Timeout策略中的简单假设变化到复杂的随机模型。
但是无论是哪种情况,在高效的功耗管理策略中,都离不开负载的信息。
3功耗管理策略
从上面的分析可以看出:首先,功耗优化是基于性能约束条件下的功耗优化,反之也成立;其次,一个有效的功耗管理方案取决于系统和负载的特性。目前,已有的DPM技术和优化策略可以分为非适应性和适应性的两大类。其中,非适应性的DPM技术以基于Timeout策略的为代表,而后者以基于预估算策略、随机控制策略的为代表。
1)Timeout策略
DPM判决策略中,Timeout策略是空闲状态在等待一段时t timeout后关闭。其算法表述如下:
Timeout PM ()
{
Begin
Initiate ttimeout
If tidle > ttimeout then shutdown
Stay in sleep until request!=0
End
}
Timeout策略中,假定Pr是退出低功耗状态所消耗的功率,tr是相应延迟,则E r =Prtr是退出低功耗的能量,Pi是处于空闲状态时的功率,则定义一个空闲等待时间阈值ttimeout
显然,当等待时间超过阈值时,进入低功耗状态能节约更多的能量。该策略的思路比较简单,当进入空闲的同时开始计时,在阈值时间ttimeout之前不关闭,到达阈值后才关闭PMC进入低功耗状态,直到接收到外界输入的任务后再返回工作状态。
由此看出,Timeout策略有比较鲜明的特点:首先,时间阈值ttimeout非常重要,合理的设置阈值将显著提高关断的正确性,假设的可信度甚至可达95%.此外,和基于预测和基于随机控制的策略相比,Timeout策略的应用相对简单。基于预测的策略是通过学习任务的分布,在输入特性和系统性能的基础上动态地改变阈值,即是通过预测来消除负载的不确定性。基于预测的策略中,如果参数较多,则将增大调整的难度,而且它不能很好地控制系统性能的损失。基于随机控制的策略是将PM看作是一系列随机最优化问题,所涉及的系统一般有多种功耗状态而不仅仅两种状态的转换。在较为复杂的多媒体、无信通信领域,上述两种策略虽然增加了系统的软硬件或性能的代价,但是和节省的功耗相比还是值得的。但在单芯片系统中,受成本和性能的限制,由于Timeout策略比较容易实现,用内部PM实现时所增加的软硬件负担相对不大,而且功耗节省明显,因此比较受到重视。本文研究的电池管理芯片是一个实时系统,保护功能的实现依赖于对供电电池状态的检测,采用基于Timeout的策略进行功耗管理,从成本、代价以及可行性方面,都是一个比较好的选择。
但是,Timeout策略有以下缺点:一是关断与否与负载的性质和状态无关,而仅仅根据任务请求来决定,这显然不能满足锂离子电池管理芯片的应用要求;二是在等待激发Timeout策略的过程中,仍然有较大的功率消耗,如果能采用预关断策略,即在系统已经历的时间和负载性质确定的基础上,在等待开始时就关闭,这样就可以节省等待期间的功耗。针对上述Timeout策略的缺点,本文提出了一种基于负载驱动的预关断Timeout策略。
2)基于负载驱动的预关断Timeout策略
一般地,根据负载性质,假定PMC有L种功耗状态,其中L是对应完全工作状态,1,…,L-1是不同的睡眠状态,则Pl(l=1,…,L-1)是对应不同状态的功耗,从l(l=1,…,L)到m(m=1,…,L,m≠l)不同状态之间转换将有能量和延迟的代价,分别是功耗Ptl,m和延迟tl,m 。为分析简便,在状态变化为从l(l=2,…,L)到m(m﹤1),功耗和延迟都很低,可以忽略不计。
再定义一个参数Zl(l=1,…,L-1),它是为了获得正的能量必须维持在l状态的时间,则有
式中,等式左项代表的是维持在l状态比在l+1状态时,能够节省的能量值,右项表示从l到L以及l+1到L的状态转变间的差值,因此有
前面已提出,结合应用要求和功耗管理成本,规定电池管理芯片的PMC,只有两种功耗状态,因此有L=2,其中l=1代表关状态,l=2代表开状态。当l=1时,式(3.3.3)变为
可以用式(3.3.4)描述常规的Timeout策略:当空闲时间t idle比空闲等待时间阈值t 1长时,此策略便假定,在t 1 +Z 1时间段内仍有可能保持空闲,此时关断显然可以节省功耗。而事实上,在能够检测到负载特性的基础上,对于可以处于空闲状态而不影响输出状态的部分电路,只要满足tidle> Z1,就可以在空闲等待开始便被关断。
可以从负载、器件和功耗状态的角度,分析比较常见的Timeout策略和基于负载驱动的预关断Timeout策略,结果如图3.3.4所示。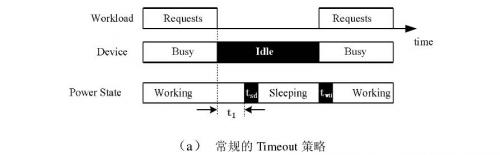
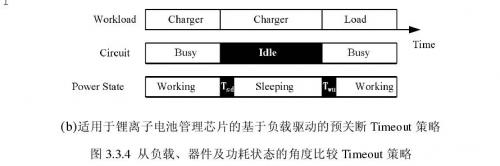
图3.3.4(a)中,t 1为等待阈值时间值,Tsd和Twu是状态转变对应的延迟,功耗状态的转换只是根据任务请求;图3.3.4(b)所示的Timeout策略中,功耗状态的转换是基于负载性质和电路状态的判别,所以可以在等待开始时就关断相应电路,此时系统代价仅是功耗转换之间的延迟。显然,和常规策略相比,基于负载驱动的预关断Timeout策略可以节省更多的功耗。
4 DPM技术实现框图如前所述,假设电池管理芯片的PMC具有两种功耗状态,系统的PSM就可以如图3.3.5所示。系统有三种功耗状态:一是所有功能模块都正常工作的状态,所消耗功率为正常(Normal),二是根据负载特性动态地关闭部分功耗较大的功能模块,即较低功耗状态(Partly Shutdown)最后是将系统电源及时切断,最低功耗状态也就是Power Down模式。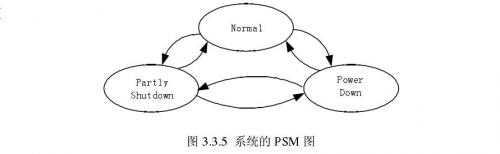
为了实现图3.3.5所示的系统PSM,在原系统框架的基础上,本文设计了一个内部PM,并且采用基于负载的预关断Timeout功耗管理策略优化功耗,如图3.3.6所示。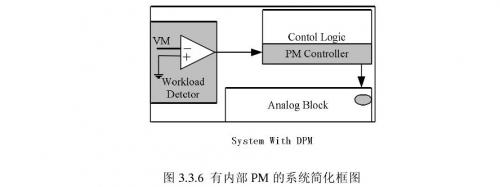
从外部和内部PM的分析比较可以看出,在能够准确地检测出负载性质和系统状态的前提下,锂离子电池管理芯片采用内部PM,将能够以较小的硬件代价实现快速、灵活的动态功耗管理。图3.3.6中的PM由负载检测电路、PM控制器组成。其中,控制器是一个状态机,为了尽量减小系统PM控制电路的代价,将其置于系统原有的逻辑电路中,这样也能保证不影响系统其它功能。
PM具体的工作过程如下:利用检测充放电电流的VM端,设计一个比较器,根据VM端电压极性来判断所接负载特性,内部功耗控制逻辑电路接收比较器输出信号后,则输出相应的控制信号,然后将此时系统中电流消耗较大,但又可以处于空闲状态的模拟电路关断。在内部PM中,所有模拟电路的关断都可以由一个MOS开关管控制,DPM信号由控制器输出,控制开关管的导通,从而在需要时能切断电路与电源或到地的通路。
锂离子电池管理芯片的DPM工作流程见图3.3.7.在图3.3.7(a)中,利用系统检测模块实时监测负载,并判断负载是放电负载还是充电器。接负载放电时,如果电池处于过充电状态,则不启动DPM,所有功能模块都正常工作;如果电池不是过充电,则将充电电压取样电路关闭,换句话说,此时系统将对过充电状态的实时检测以节省功耗:如果所接的是充电器,则同样需要预先判断是否过放,是过放状态则不启动DPM,否则将过放电电压取样电路关闭,此时系统不再认为电池还会处于过放状态。图3.3.7(b)则是利用电池在过放状态下,根据VM与VDD间的压降决定是否进入Power Down状态,即关闭系统电源以维持极低的电流消耗。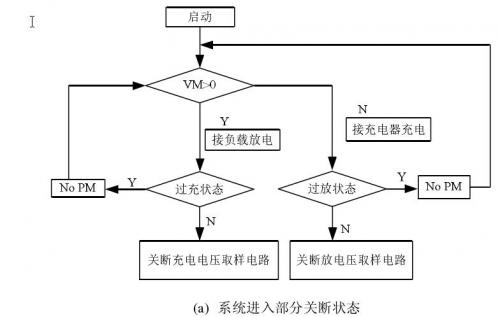
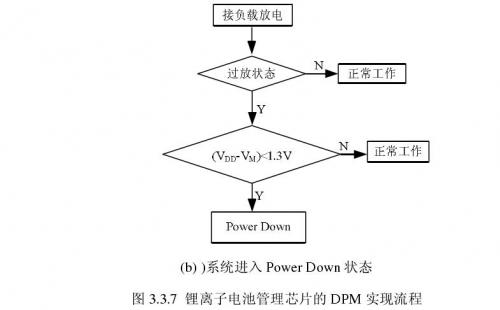
从流程图中还可以看出,正是基于负载的预关断Timeout策略,锂离子电池管理芯片的DPM实现对于不同的负载是有差别的:在负载为充电器时,经过放电检测延时时间tDL后,系统决定是否采用功耗管理;而所接负载是充电器时,则要在过充电检测延时时间tCU后,再决定是否可以预关断。这种差别产生的本质在于,面向锂电池管理芯片的这种Timeout策略不仅需要对负载做出判别,还要利用系统的工作状态,选择需要功耗管理的相应模块。
3.3.2电路级的功耗优化1亚阈值电路的优缺点正如第二章所指出,在现有的模拟电路低功耗技术中,亚阈值电路有着特殊的地位和作用,在一些对速度要求不是很高的低功耗场合,亚阈值电路是一种较好的选择。
表3.1列举了亚阈值电路的优缺点。在给定的电源电压范围下,亚阈值MOS管的饱和电压约为100mV,这将大大提高电路的动态范围,也说明在低电压下电路仍有较好的动态特性;低的漏电流也增加了它在低电流功耗系统中的优越性。此外在高频时,RN正比于1/gm,而亚阈值区的gm/ID最大,所以此时噪声最小;在低频时,闪烁噪声占主要地位,而且RN与ID无关,因此在同样的ID下,亚阈值MOS管较高的W/L也意味着更低的RN。
另外,亚阈值MOS管的栅极传输特性具有斜率因子为n的指数关系。源极传输特性与双极晶体管相同,并且其特性可以用栅压来调节,所以在有些情况下,可以用MOS管代替实现类似双极晶体管所能实现的功能。
2电路设计中的控制和判断
从电路设计角度,不仅需要控制及判断MOS管的工作区域,还需要掌握各工作区域的特征参数,下面分别进行讨论。
对于MOS管,其工作区域主要有线性区(可变电阻区)、饱和区和亚阈值区,根据MOS管在模拟电路中的功能不同,其工作区域的设定显得尤为重要。通常情况下,如恒流源电路等,MOS管工作在饱和区;在个别情况下,MOS管工作在线性区,主要当作电阻使用,特别是大电阻,其明显的优点是占用较小的版图面积,而且相对来讲,比电阻的工艺漂移小;此外,对于MOS工作在亚阈值区的情况,在功耗要求特别低的场合,将能解决实际问题。对MOS管的工作区域设定应满足以下要求:
①若要求MOS管工作在饱和区,理论上要保证VGS>VTH及VDS≥VGS -VTH;
②若要求MOS管工作在线性区,要保证VGS>VTH及0﹤VGS﹤VGS-VTH;
③若要求MOS工作在亚阈区,则要保证栅压满足0﹤VGS﹤VTH
但在实际应用时,当V GS与V TH值相差不大时,MOS管将工作在亚阈值区与强反型区的过渡状态,严重影响电路的性能。将电路的工作状态分为弱反型、中等反型和强反型,各个状态之间的界限可根据电压或电流来估计,其方法描述如下:
①电压估计法
a)当VGS〉VTH+100mV,为强反型;
b)当VTH +100mV>VGS>VTH -100mV,为中等反型;
c)当VGS﹤VTH-100mV为弱反型;
②电流估计法
a)当ID〉10IS
b)当10IS>ID>0.1IS,为中等反型;
c)当ID﹤0.1IS,为弱反型
其中,IS被称为中等反型特征电流,其表达式如下:
对于W/L=1的NMOS管,I S的典型值从100nA到500nA之间;对于W/L=1的PMOS管,IS的典型值从40nA到120nA之间。对本设计所使用的工艺,可以计算出宽长比为10u/10u时,P管的亚阈值特征电流I SP约为120nA,N管的特征电流I SN约为230nA.涉及弱反型MOS管的特征参数还有:
①输出电阻考虑沟道长度效应的传统方法是在漏电流方程后乘上(1+VDS /VA),因此
VA为弱反型的欧拉电压。因此,弱反型 MOS 管的输出电阻为
对于给定尺寸的器件,当工作区域从强反型变化到弱反型时,漏电流将下降,对应输出电阻将增加。
②跨导gm
由弱反型MOS管的漏电流方程,很容易推出其跨导为
③体跨导gmb
体跨导的定义为
通常gmb被表示成gm的一部分,即
对于VSB很小时
在弱反型区有
由于k随着VSB增大而增大,一个较为合理的取值为:
3.4小结
本章从系统层次,讨论了锂离子电池管理芯片中的功能设计和功耗优化。
针对锂离子电池管理芯片的应用特点,分析了系统设计中的重点及难点。提出了实时完整的保护功能设计目标后,给出了系统框图。
功耗优化是锂离子电池管理芯片的一个重要目标。混合信号芯片中,DPM技术同样可以由三要素构成:功耗模型、判决策略及电路实现。本章在系统组件的功耗模型基础上,给出了系统的功耗状态机图。确定判决策略时,虽然基于预估算和随机控制的策略在一定程度上,能更好地根据负载变化控制系统功耗,但是所增加的软硬件成本使得它们更适用在实时嵌入式系统中;对于单芯片系统,基于Timeout的策略简单有效,所增加的硬件成本有限而有更大的应用前景,但是由于传统的Timeout策略不涉及负载性质,对功耗优化有很大的不确定性,而且在等待期间的功耗也不容忽视,所以本文提出了基于负载的预关断Timeout策略。然后,本章还给出了系统级DPM实现框图,并提出了能实现两级功耗管理的DPM工作流程,具体的电路将在下一章给出。
此外,基于亚阈值电路在低电流消耗场合的综合表现,对工作在亚阈值区的MOS管作了进一步的分析讨论,并提出了设计中工作状态的判断标准及控制方法。
本章是后面低功耗电路实现及验证的功能设计目标和功耗管理基础。

评论