漫谈中美无人驾驶技术差距(上)
本文引用地址:http://www.eepw.com.cn/article/201702/343804.htm

↑TerraMax的陆地挑战赛参赛车型
由于2004年当时的技术限制,在当年第一届无人驾驶陆地挑战赛举办的时候甚至没有一家参赛队伍能够完成主办方DARPA设定的加州莫哈韦沙漠240公里赛道。因此在2005年的第二届陆地挑战赛中DARPA将赛道的最低目标距离设定为11.78公里。这也是第一届中无人驾驶汽车最远的行驶。此届挑战赛中有5辆无人驾驶汽车完成了目标。而其中比较出名的应该就是如上照片中显示的TerraMax无人驾驶卡车。上图为2005年TerraMax的陆地挑战赛参赛车型。下图为在BBC TOPGEAR汽车节目19季第5集中出镜的TerraMax无人驾驶卡车(左)和詹姆斯梅驾驶的路虎揽胜(右)的越野比赛起点照片。要知道TerraMax还仅仅是2005年挑战赛中5个完赛队伍中的最后一名。

↑BBC TOPGEAR出镜的TerraMax无人驾驶卡车(左)和詹姆斯梅驾驶的路虎揽胜(右)
第三届的陆地挑战赛被DARPA官方称为城市挑战赛(Urban Challenge)。于2007年在加州的乔治空军基地进行。比赛被设定成让无人驾驶汽车可以使用于城市驾驶环境中。赛道全长96公里,限时为6个小时。并且不同的队伍之间会有路线交叉的过程。而如果大家去搜索美国Velodyne公司的历史的话,就会发现它的前期主要产品为音响产品。就是因为Velodyne公司参与了前两届的DARPA陆地挑战赛,才开始了激光扫描仪产品的开发,并成为业界360度高性能激光扫描仪的领先者。因此说DARPA挑战赛成就了如今的Velodyne,成为激光扫描仪LIDAR界的巨人一点不为过。

↑Velodyne公司的激光扫描仪产品
到了2007年的城市挑战赛中,Velodyne公司的激光扫描仪已经应用到了大部分的参赛队伍中。6个完赛的参赛队伍中只有第三名的VictorTango队没有使用Velodyne公司产品。

↑斯坦福队使用的大众帕萨特旅行版(左)和VictorTango队使用的福特翼虎(上)在路口相遇
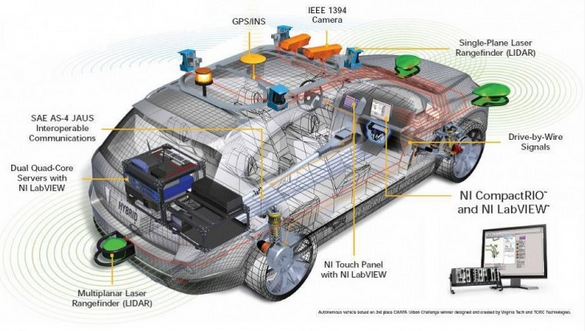
↑VictorTango所用的来自IBEO和SICK的传感器
上图一为城市挑战赛中斯坦福队使用的大众帕萨特旅行版(左,第二名完赛)和VictorTango队使用的福特翼虎(上,第三名完赛)在路口相遇。上图二为VictorTango所用的来自IBEO和SICK的传感器。而IBEO是小型化低成本激光扫描仪的领先者。SICK则是IBEO的母公司,并且拥有众多的激光传感器产品。IBEO和SICK的激光扫描仪也应用在前三名完赛的队伍中,普及率仅次于美国Velodyne公司。

↑斯坦福队无人驾驶汽车主要开发成员Sebastian Thrun








评论