MATLAB/SIMULINK的永磁同步电机矢量控制系统仿真研究
1.引言
本文引用地址:http://www.eepw.com.cn/article/201612/328470.htm随着高性能永磁材料、大规模集成电路和电力电子技术的发展,永磁同步电机因为其功率密度高,体积小,功率因数和高效率而得到发展,且引起了国内外研究学者的关注。传统的控制方式由于引入了位置传感器而给当前的调速系统带来了一系列的问题:占据了比较大的有效空间,使系统编程复杂。因此无位置传感器控制系统的研究变得越发的重要。
2.PMSM的坐标系和数学模型

永磁同步电机在定子三相(ABC)静止坐标系下的电压方程:

式中,三相绕组的相电压瞬时值分别为A u 、B u 、C u ; A i 、B i 、C i 是相电流的瞬时值; s R 是永磁同步电机定子的每相绕组电阻; A ψ 、B ψ 、C ψ 是永磁体的磁链在各相绕组的投影。在d-q旋转坐标系下的电磁转矩方程为:
3.SIMULINK仿真
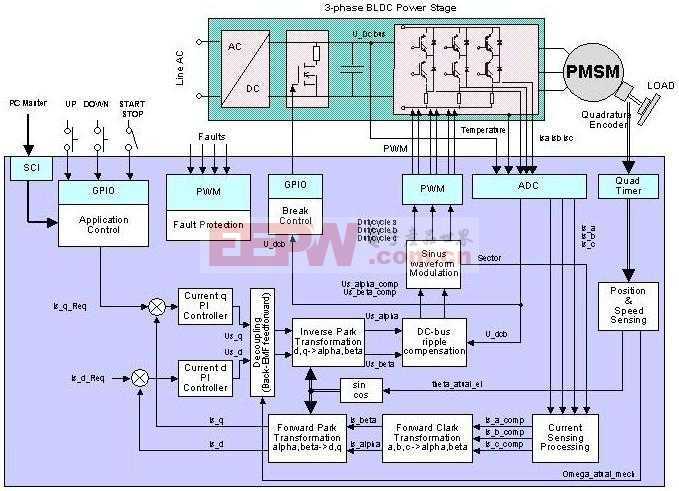
永磁同步电机无传感器矢量控制的系统结构框图,在MATLAB/Simulink下建立PMSM驱动仿真分析,用id=0时的无传感器矢量控制系统的仿真模型如图2所示,各个模块介绍如下:给定的参考转速是700rpm;速度通过PI调节模块,实现转速的闭环控制策略,该调节采用了输出限幅;接着是电流PI调节器模块构成电流的闭环控制,输出了定子的电压dq轴分量ud和uq;I-park逆变器模块将两相旋转直角坐标系(dq)下的值向两相静止坐标系(αβ)下变化,它的输出是αβ轴的定子电压分量参考值Ualfa,Ubeta;SVPWM和逆变模块用于实现参考电压逆变及其调制,从而可以直接通给电机;PMSM是永磁同步电机模块,负载转矩是模块Tm.反馈通道模块有:
Clark变换模块:实现三相坐标系(ABC)向两相直接坐标系(αβ)的转换,输出的αβ坐标系下的电流值和电压值作为观测器的输入,其中SMO模块是反电动势估算模块,SMO1是转速和转角估算模块,这两点是讨论的关键问题所在。

3.1 滑膜观测器模块
由滑膜观测器的理论可以构造滑膜观测器:由观测器和控制驱动器构成的物理模型如下:
控制系数z的目标是使电流的估计误差接近0.通过合适的选择系数k和正确的估算反电动势。在这里标志? 表示变量是估算的。标志*表示这个量可以获得。
离散化后的公式:
这里Ts是采样周期。
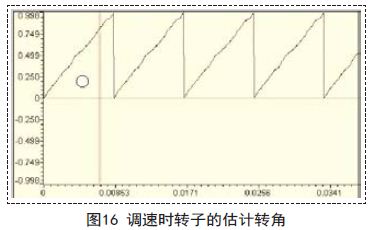
电机的角度估算值和反电动势之间的关系是:
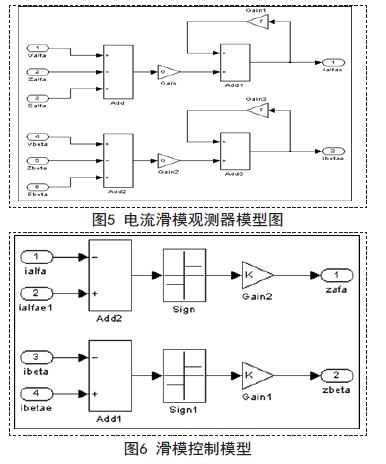
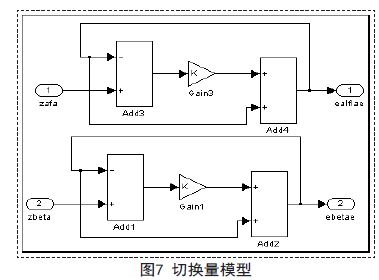
转子角度的计算步骤为:电流观测器(图4示意图),滑模控制(图5到图7示意图),以及反电动势的计算图。
滑膜观测器构成原理图和框图分别是:
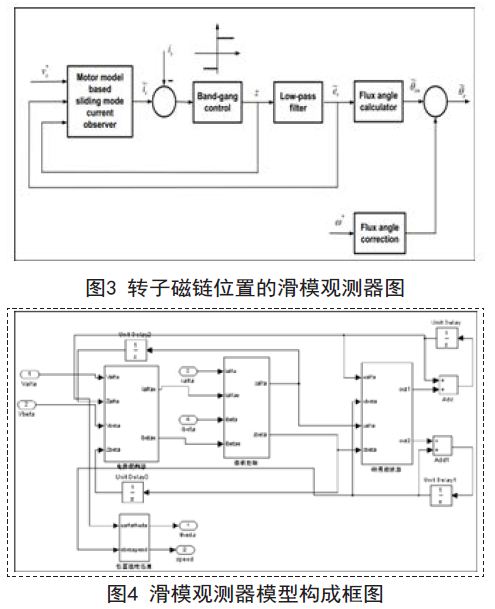
计算步骤是:电流观测器,滑模控制,以及反电动势的计算图。
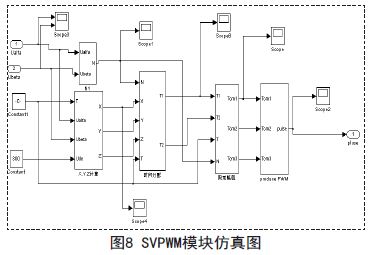
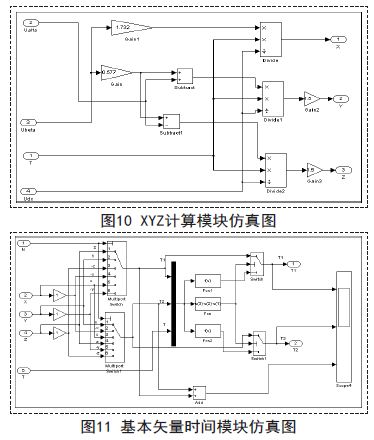
3.2 空间矢量脉宽调制(SVPWM)
主要包括通过逆变器确定矢量所在的扇区,合成矢量分解到相邻扇区的作用时间,计算电压空间矢量的切换点。
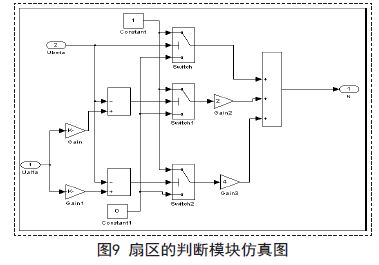
(1)判断矢量所在的扇区:
如果Va>0,则A=1否则A=0;如果Vb>0,则B=1否则B=0;如果Vc>0,则C=1否则C=0.扇区计算公式为:



4.实验结果
永磁同步电机的定子相电阻是0.195684ohm,转动惯量是0.704905kg.m2,极对数是12对极,额定转矩是160N.m,额定转速是700rpm,以下是永磁同步电机滑模控制系统的仿真结果。
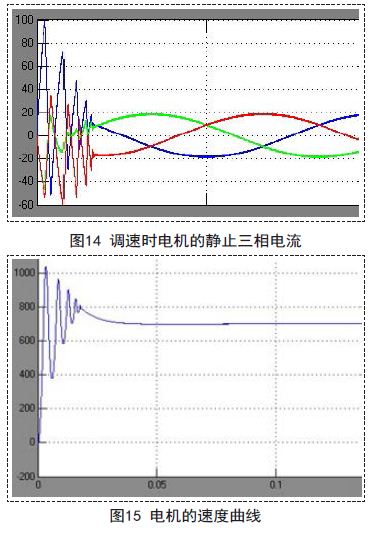
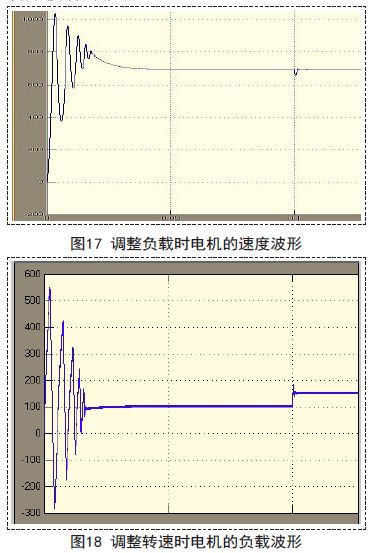
负载突变时对调速系统的影响,结果分析:在仿真模型中,负载转矩给定值是100N.m,在0.1s秒时增加到160N.m,通过以下仿真图来分析变化的负载转矩对系统影响。图4.22是永磁同步电机在负载突变情况下的转速波动图,从仿真图形可以看出电机控制经过短时间的振动,进入稳定的运行状态且转速稳定在700rad/s,转速没受到负载转矩波动的影响。
5.实验结果与分析
本文析了永磁同步电机状态方程,设计了滑模仿真器,并进行了坐标变换,通过MATLAB/Simulink进行了模型的仿真和调速,仿真的结果表明该种控制方式是有效的,能够估算出转子位置信息极该种滑模控制是稳定而且有效的,最后分析了负载转矩扰动和系统参数变化对滑模控制性能的影响。结果说明基于滑模控制的永磁同步电机无传感器控制系统具有很强的鲁棒性,并且使用场合广泛。










评论