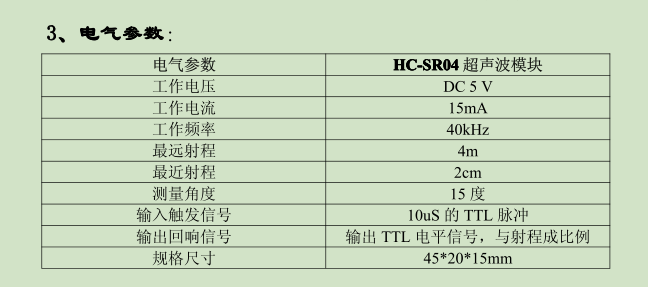
超声波测距模块参数
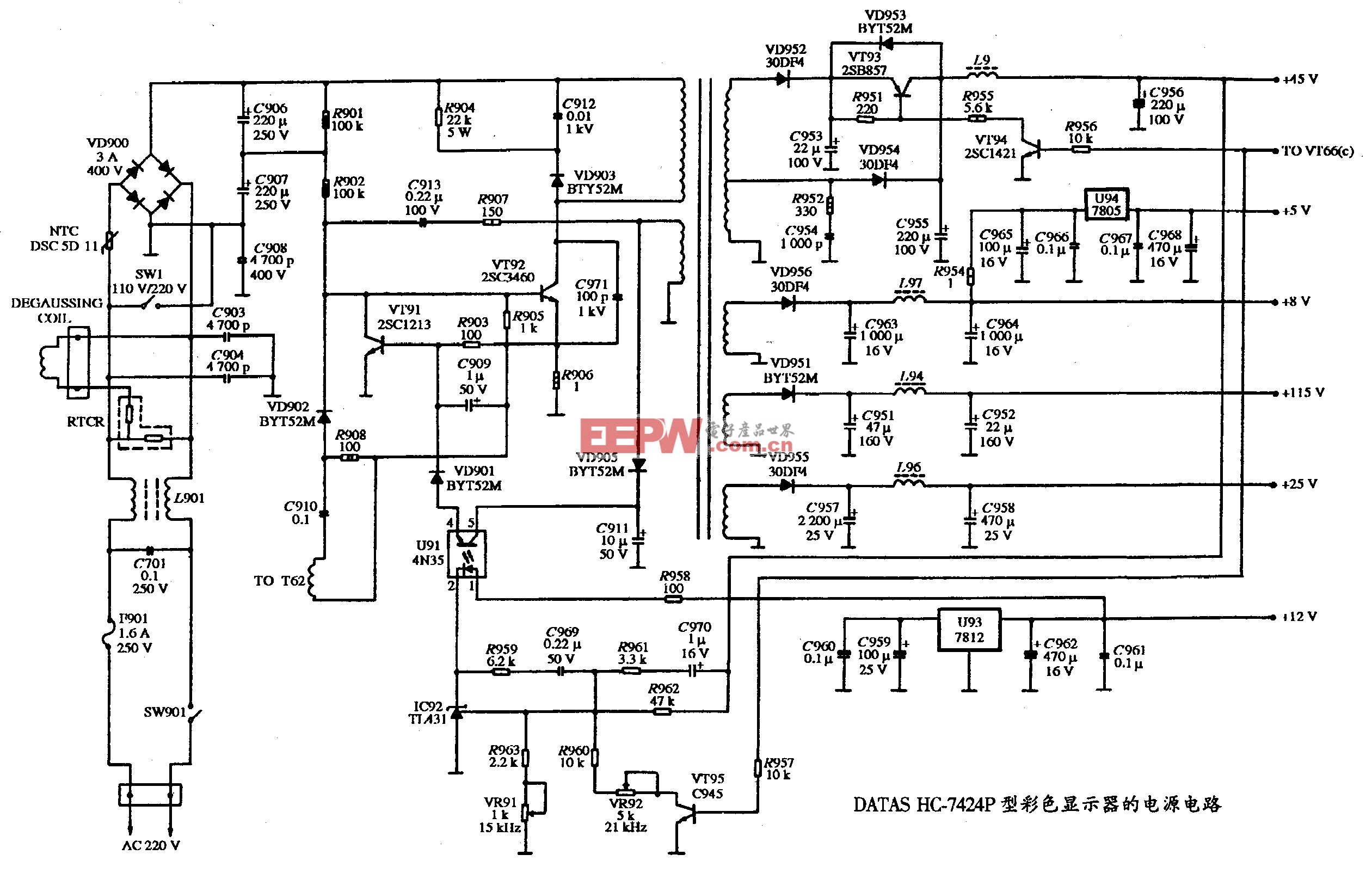
超声波测距模块内部电路图
本文引用地址:https://www.eepw.com.cn/article/201611/322501.htm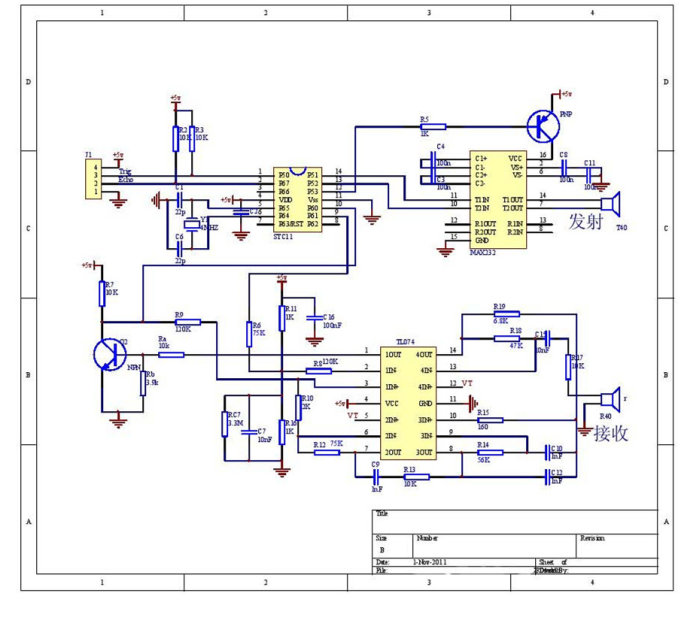
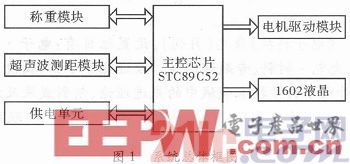
超声波测距模块与51单片机连接电路图

51单片机C语言参考程序
#include //调用单片机头文件
#define uchar unsigned char//无符号字符型宏定义变量范围0~255
#define uintunsigned int//无符号整型 宏定义变量范围0~65535
#include
#include "eeprom52.h"
sbit c_send= P3^3;//超声波发射
sbit c_recive = P3^2;//超声波接收
//这三个引脚参考资料
sbit rs=P1^0;//1602数据/命令选择引脚 H:数据L:命令
sbit rw=P1^1;//1602读写引脚H:数据寄存器L:指令寄存器
sbit e =P1^2;//1602使能引脚下降沿触发
uchar code table_num[]="0123456789abcdefg";
sbit beep = P1^4;//蜂鸣器IO口定义
bit flag_300ms ;
long distance;//距离
uint set_d;//距离
bit flag_csb_juli;//超声波超出量程
uintflag_time0;//用来保存定时器0的时候的
uchar menu_1;//菜单设计的变量
void delay_1ms(uint q)
{
uint i,j;
for(i=0;i
for(j=0;j<120;j++);
}
void write_eeprom()//保存数据
{
SectorErase(0x2000);
byte_write(0x2000, set_d % 256);
byte_write(0x2001, set_d / 256);
byte_write(0x2058, a_a);
}
void read_eeprom()//读出保存数据
{
set_d= byte_read(0x2001);
set_d <<= 8;
set_d|= byte_read(0x2000);
a_a= byte_read(0x2058);
}
//
void init_eeprom()////开始初始化保存的数据
{
read_eeprom();//读出保存数据
if(a_a != 2)//新的单片机初始单片机内问EEPOM
{
set_d = 50;
a_a = 2;
write_eeprom();//保存数据
}
}
void delay_uint(uint q)
{
while(q--);
}
void write_com(uchar com)
{
e=0;
rs=0;
rw=0;
P0=com;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
void write_data(uchar dat)
{
e=0;
rs=1;
rw=0;
P0=dat;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
void write_string(uchar hang,uchar add,uchar *p)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
while(1)
{
if(*p == �)break;
write_data(*p);
p++;
}
}


评论