数字式MEMS加速度传感器在车载导航中的应用
随着定位导航技术的飞速发展,车载导航系统在相关领域得到了越来越广泛的应用。车载导航系统的功能是帮助用户确定车辆位置并提供正确的操作指示,因此定位的精确程度成为衡量一套系统性能优劣的重要指标。目前,随着城市道路的发展,高架路日益成为城市交通的枢纽,因此如何对车辆是否位于高架上的定位成为了车载导航系统急需解决的问题。常用的GPS 卫星定位虽然可以测量高度,但是误差却在100m左右,无法达到高架一般几米的要求,所以直接测量的方法是很难满足的。
本文引用地址:http://www.eepw.com.cn/article/201610/311129.htm这里使用国外成熟的加速度计器件ADXL 202JE,通过测量车辆上下高架时的倾斜角变化,结合GPS定位来判断车辆是否位于高架上。
系统设计
测量原理
ADXL 202JE采用先进的MEMS技术,在同一硅片中刻蚀了一个多晶硅表面微机械传感器,并集成了一套精密的信号处理电路,如图1 所示。
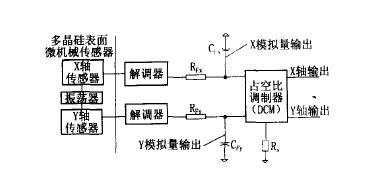
图1 ADXL 202 功能结构框图
传感器主要是由一个利用表面微机械加工的多晶硅机构和一个差动电容器组成。在加速度的作用下,多晶硅结构会产生偏移使电容值发生变化。在信号处理电路中(如图1) ,差动电容器的变化信号由解调器解调后通过一个RC 滤波器(由内部RFy,RFy和外部CFy,CFy构成) 送到占空比调制器中,由调制器转换为占空比与加速度成正比的方波,方波的周期(T2) 可以通过RS 确定。这个方波可以直接送到单片机进行处理,通过使用计数器测量方波周期T2 以及脉冲的宽度T1 (如图2) ,从而得到加速度的值。
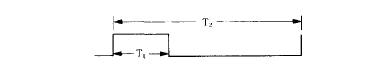
图2 ADXL 202JE 输出波形示意图
加速度: a= (T1/T2- u0g)/u1g式中:T2 由占外接电阻器RS 确定,其关系为T2= RS/125兆欧; u0g为0g 对应的占空比,其典型值是50%; u1g表示1g 加速度变化引起的占空比变化值,对于ADXL 202JE,1g的典型值是12.5%。
硬件设计
如图3,系统主要包括三个部分。

图3 测量电路原理框图
(1) 测量部分电路主要由ADXL 202JE构成,并辅助以一些滤波及调节电路;
(2) 系统控制电路部分主要由AT89C52单片机以及MAX232构成,由单片机处理占空比调制信号,MAX232芯片实现串口通信;
(3)GPS模块选用摩托罗拉的GT型Oncore接收器。
软件设计
单片机采用中断触发的方式来测量传感器输出脉冲周期,从而计算当前系统的倾斜角,并结合GPS模块判断车辆是否上高架,主要流程框图如图4 所示。
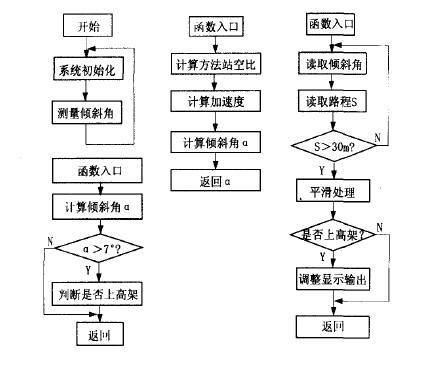
图4 程序流程图
结论与讨论
测量动态加速度的带宽选择
ADXL 202JE带宽式中:
占空比调制器周期的确定
对于ADXL 202JE,当DCM输出方波频率大于模拟带宽10倍以上,测量准确度就很理想,因此周期越小越好。但是周期的减小对微控制器的处理速度要求会提高,而实际中硬件的处理速度是受到器件性能限制的。综合以上因素,方波的周期是根据模拟带宽、处理器速度以及测量分辨力的要求共同确定的。
实验分析
根据实际的精度要求,实验选用1uF 的滤波电容,这样带宽为5Hz,噪声约为0.43mg。Rs阻值为1M,这样输出方波周期约为141Hz。采用12M晶振的单片机,这样占空比的精度可到达0.14%。在实际车载实验中,经过滤波和平滑处理,并通过反复调试基本实现了设计目的(图5 是实际测得的数据)。
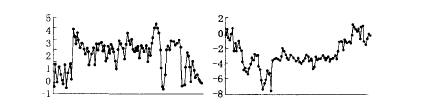
图5 车辆上下高架时倾斜角测量曲线
结论
应用上述的设计方法及其要点,基本实现了对车辆定位的要求,达到了预期效果。实践证明ADXL 202JE非常适合于频率变化较为缓慢、加速度不太大的测量。在充分考虑各种因素基础上,合理设计有关参数,就可以得到很好的准确度。












评论