基于模型的嵌入式PID控制器设计

摘要:在嵌入式控制系统中,PID控制器应用广泛。鉴于实时性和同步性的要求,传统的PID控制器通常采用手工编程来实现。该种实现方式,费时费力,可靠性低,后期的验证测试过程繁杂。为解决该方法不足,本文研究了基于模型的高安全性应用程序开发环境-SCADE,按照SCADE的软件程序设计流程,完成了PID控制器的设计、开发与性能测试,并通过代码的效率测试,验证了SCADE进行嵌入式软件开发的优越性。
本文引用地址:https://www.eepw.com.cn/article/201610/307824.htm在过程控制和运动控制系统中,特别是在嵌入式控制系统中,PID(比例-微分-积分)控制器因其结构简单,物理意义明确,使用中不需精确的系统模型等先决条件应用广泛。鉴于嵌入式控制系统设计的严格要求,传统的嵌入式PID控制器通常采用手工编程来实现。该种实现方式费时费力,可靠性低。为解决传统设计方法不足,本文研究了基于模型的高安全性应用程序开发环境-SCADE的技术特点,在该环境下完成了PID控制器的设计与仿真,并对生成的代码进行了分析和效率测试。最终表明,该设计方法切实有效。
1 SCADE软件设计流程
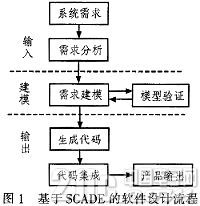
SCADE(Safety-Critical Application Develooment Environment)是Esterel Teclmologies公司研制的一套高安全性的嵌入式软件开发环境,针对嵌入式软件的特点,运用Correct By Construction的设计理念,提供了一种基于模型的图形化开发方式,覆盖了从需求分析到代码实现的整个软件开发流程。
SCADE提供了一系列的开发工具套件,实现了直观的图形化需求建模,基于模型的仿真验证,标准C代码自动生成、开发文档自动生成等多种功能。其严谨的建模理论和经过高安全性标准鉴定代码生成器KCG,保证了软件需求到产品代码的高度同步。软件设计流程如图1所示。
2 PID控制器设计
在模拟控制系统中,控制器最常用的规律是PID控制。常规PID控制系统由PID控制器和被控对象组成,具体如图2所示。
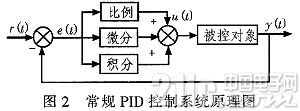
PID控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例(P),积分(I)和微分(D)通过线性组合,构成控制量对被控对象进行控制。其控制规律为

式中,u(t)为进入受控对象的控制变量;e(t)为误差信号,e(t)=r(t)-y(t),r(t)为给定参考输入值。由于计算机控制是一种采样控制,根据采样时刻的偏差值直接计算控制量,必须进行离散处理,用求和的形式代替积分,用增量的形式代替微分。式(1)离散化得:
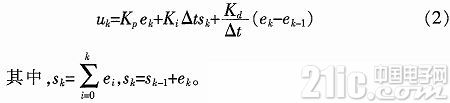
由式(2)在SCADE中构造PID控制器,其结果如图3所示,其中控制参数Kp、Ki、Kd和误差ek为输入,uk为输出,t为采样时间。
3 PID控制系统实现
本控制系统中,被控制对象传递函数
,其中J=0.0067,D=0.10经离散化后得:

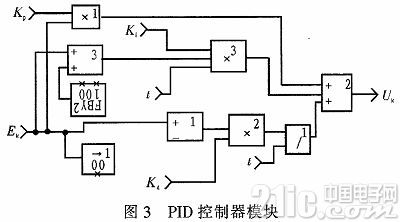
由式(3)在SCADE中构造控制对象如图4所示,Uk为输入,Yk为输出。
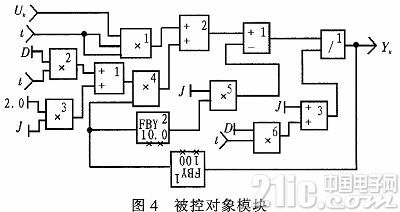
最后,由PID控制器和被控制对象,按照图2所示的结构图,构造闭环控制系统。
4 仿真分析
利用SCADE Editor完成系统建模后,进入到模型的仿真分析阶段。SCADE提供了一系列的验证机制,来确保软件需求模型描述的正确性和安全性,包括模型静态检查,模拟仿真、覆盖率分析,形式验证等等。本文首先利用SCADE模型静态检查功能,确保模型无基本语语义错误后,使用SCADESimulator进行仿真分析验证控制率,然后通过SCADE内置的代码生成器生成C代码,进一步对代码进行效率分析测试。
4.1 模型仿真
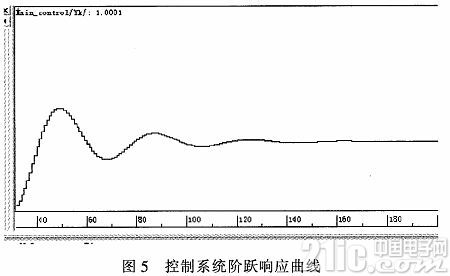
根据PID的特性,Kp影响系统的响应速度和精度,Ki影响系统的稳态精度,Kd会对系统的动态特性有影响。据此,对PID控制参数进行整定,得到Kp=8.0,Ki=0.0,Kd= 0.5。设阶跃响应r=1.0,采样时间为0.005秒。输入相应的控制参数,调用SCADE Simulator仿真环境,得到的系统阶跃响应仿真曲线如图5所示(横坐标单位ms)。
4.2 代码测试
SCADE内置的代码生成器KCG可以自动生成ANSI C的嵌入式产品代码,且代码是完全面向工程的产品代码,可以直接嵌入到产品中去而不需要做任何修改。因为SCADE模型基于严格的数学理论,它能保证代码运行的结果和仿真结果完全一致,并且该代码生成器通过了军工及航空业及能源业相关标准的鉴定。
此前软件设计人员手工编写代码,在后期验证阶段要花费大量的时间来验证程序的正确性和规范性。使用SCADE之后,只要模型级别仿真测试无误,那么后续该部分的代码单元测试可以省略。另外,SCADE提供了模型级别的覆盖率分析,对于代码的覆盖率分析也可以在模型级别完成。这样,势必能在很大程度地节省验证工作和验证时间。
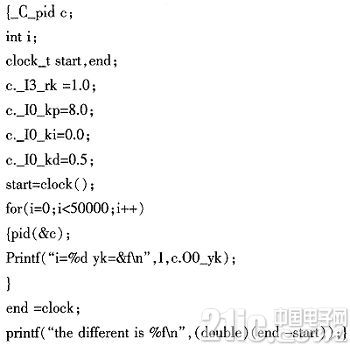
为了完成代码的效率测试分析,在前面系统仿真结果正确的基础上,通过SCADE KCG自动生成C代码。生成的软件代码可以直接在VC等C语言开发工具下进行正确编译,添加主函数后,代码即可直接运行。此处,在主函数内添加clock 函数,用以计算程序执行一定步数所消耗的时间。主函数如下:
对代码进行编译运行,在相同环境下,将生成的代码与手写代码进行比较,得到结果如表1所示:
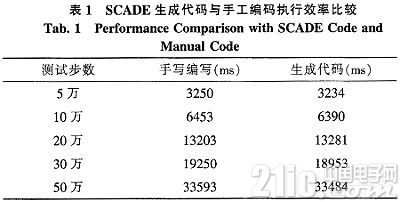
通过表1可以看出,SCADE生成的代码与手写代码在运行相同步数的情况下,所耗费的时间基本一致,代码执行效率略高。
通过分析SCADE生成代码发现,代码中每个变量在作用域内仅赋值一次,代码内无递归调用,无死循环,无动态指针,无动态内存分配。因此,在同样的测试标准下,SCADE生成的代码失效率比手写代码要小很多,相应安全性也更高。
5 结论
本文研究了基于模型的软件开发环境SCADE的技术特点和开发流程,在SCADE下完成了PID控制系统的设计、仿真、测试。通过案例研究表明,采用SCADE进行嵌入式软件开发,将软件开发流程的重点由编码阶段提前到设计阶段,这样更易于在设计早期发现不足。模型设计完成后,通过代码生成器自动生成代码,可在很大程度上减少开发时间和可发成本,提高开发效率。而且,SCADE生成的代码满足一系列的安全特性,可读性良好,和手写代码效率相当。因此,SCADE在高可靠性的嵌入式软件设计领域,应用前景广泛。



评论