基于MRAS的永磁同步电机矢量控制系统仿真研究

摘要:基于MRAS的无速度传感器矢量控制法把模型参考自适应法与转速直接计算法结合了起来,设计了合适的自适应控制率,提高了转速估计的精确度,在此基础上,利用Matlab/Simulink构建MRAS无速度传感器矢量控制系统仿真模型,仿真结果表明,转速估计精度较高,系统具有一定的鲁棒性。
本文引用地址:https://www.eepw.com.cn/article/201610/306613.htm关键词:永磁同步电机;模型参考自适应;无速度传感器;Matlab/Simulink
在高性能的交流电机变频调速系统中,不管是采用矢量控制还是直接转矩控制,转速的观测和闭环控制环节是必不可少的。通常,采用光电码盘等速度传感器进行转速检测,并反馈转速信号。但是,速度传感器的安装给系统带来一些缺陷:
1)增加系统的成本,码盘精度越高,价格越贵;
2)码盘在电机轴上的安装存在同心度问题,安装不当将影响测速精度;
3)增加了电机轴向设备,给电机的维护带来一定困难;
4)在恶劣的环境下无法工作,且码盘工作精度易受环境条件的影响。
因此,越来越多的学者将目光投向了无速度传感器控制系统的研究。现今已经有许多方法可以对电机转速进行估计,主要有:基于电动机数学模型计算出转速;利用感应电动势和磁链计算速度;运用模型参考自适应原理来辨识速度;向电机注入高频信号,利用电机的结构特征检测出转速等。模型参考自适应法(MRAS)就是其中使用频率较高的一种方法。本文首先简单分析了基于模型参考自适应法估计转速的原理,并以此基础在Matlab/Simulink中对转速估计进行建模,最终搭建出基于MRAS的无速度传感器矢量控制系统,并对其进行仿真验证。
1 模型参考自适应法的原理
MRAS核心是模型参考自适应辨识,主要思想是将含有待估计参数的方程作为可调模型,将不含未知参数的方程作为参考模型,并且两个模型具有相同物理意义的输出量。两个模型同时工作,利用输出量之间的差值构成合适的自适应率,调节可调模型的参数,以达到控制对象输出跟踪参考模型的目的。
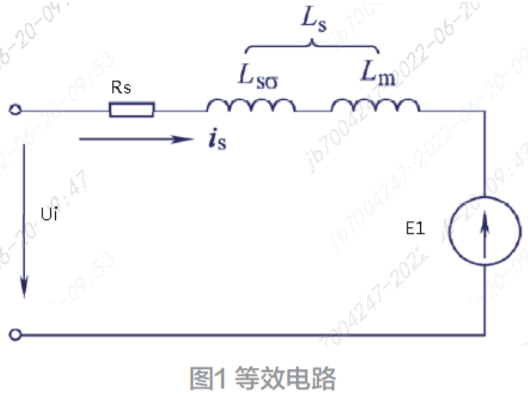
永磁同步电机在两相旋转(dq)坐标下的定子电流方程为:
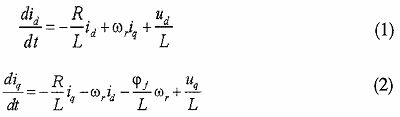
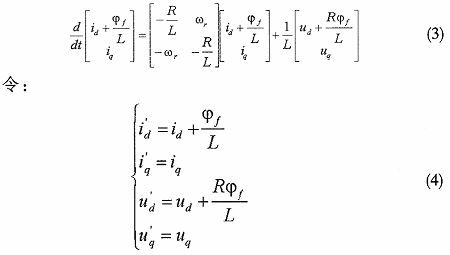
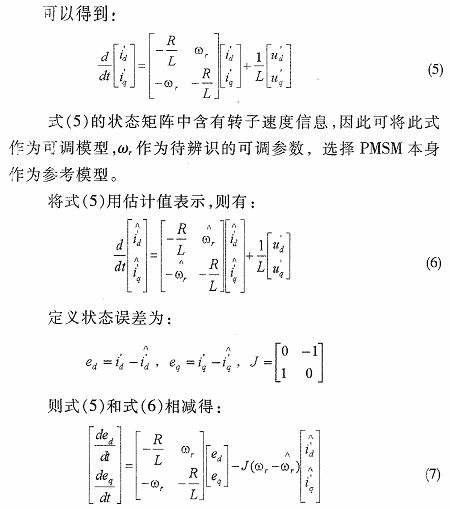
由式(1)、(2)可以看出,定子电流的数学模型只与电机的转速wr有关,所以选择电流模型作为可调模型,永磁同步电机本身作为参考模型,同时采用并联型结构进行转速辨识。为便于对系统的稳定性进行分析,应使转速wr存在于系统的状态矩阵中,对以上两式中控制量与状态量进行变化得:
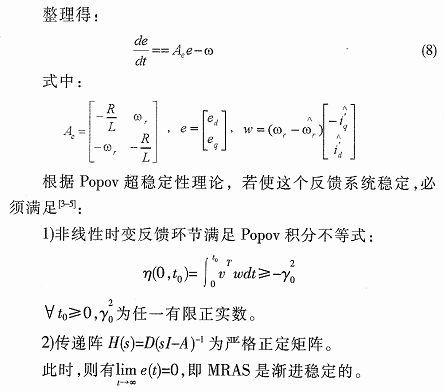
对Popov积分不等式进行逆向求解,即可得到自适应规律如式(9)所示。
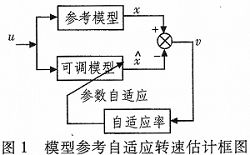
基于模型参考自适应法的电机转速估计模型框图如图1所示。
在Matlab/Simulink环境下,按照上述方法建立的基于模型参考自适应的电机转速估计仿真模型如图2所示。

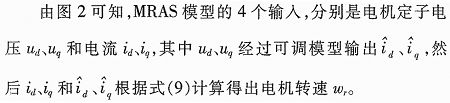
2 基于MRAS的永磁同步电机矢量控制系统仿真
通过上文的分析及建模,在Matlah/Simulink环境搭建基于模型参考自适应的速度估计的矢量控制系统,其中使用的永磁同步电机参数为:极对数P=4,定子电阻R=0.958 5 Ω,d轴和q轴电感Ld=Lq=5.25 mH,磁极磁通ψf=0.182 7 Wb,转动惯量J=0.000 632 9kg·m2,功率器件的开关频率是10 kHz。仿真结构如图3所示。
主体部分采用的是基于电压空间矢量PWM矢量控制系统,基于模型参考自适应的速度估计器代替了传统转速检测的环节,搭建出了无速度传感器矢量控制系统。
3 仿真结果
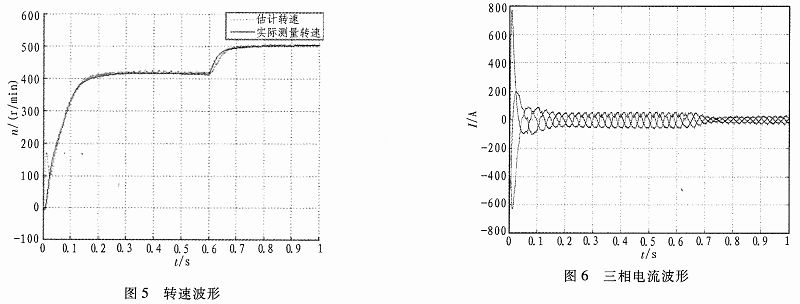
3. 1 转速估计仿真结果
图4为估计转速和电机测量模块输出的实际转速间的比较。设定总的仿真时间为1 s,速度给定500 r/min。
图(a)中波形中有小幅波动的是估计转速,图(b)波形比较平滑的是输出的实际转速,总体来看差异很小。
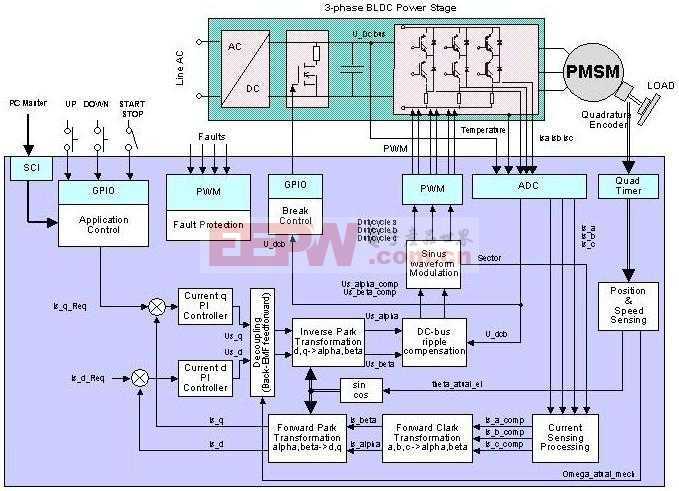
3. 2 系统仿真结果
由图3总仿真模型,通过仿真可得到基于模型参考自适应的速度估计矢量控制系统性能。其仿真结果图如下所示。
转速设定为50O r/min,系统加负载80 N·m启动运行,在0.6 s时负载降为0。
图5为电机转速波形,虚线部分为估计转速,实线部分为测量转速,由图可以看出估计转速紧紧跟随着测量转速,由于带负载运行,电机稳定时转速略有下降,负载下降后,转速最终稳定在500 r/min。
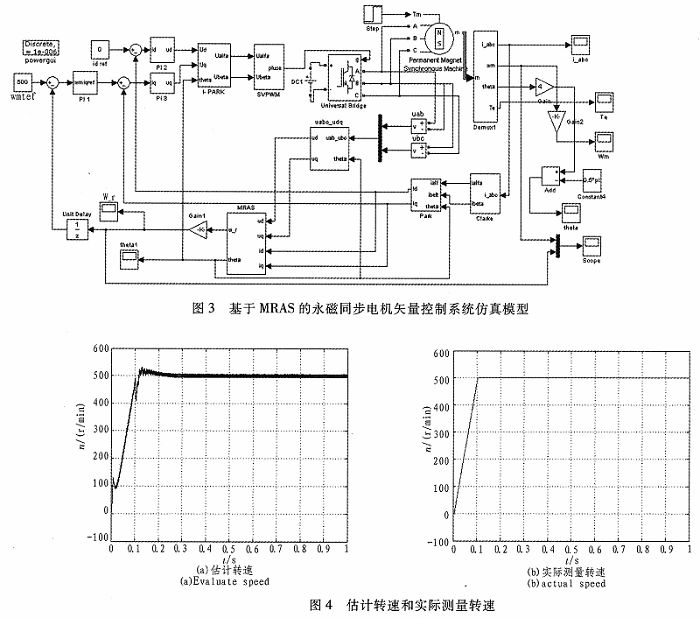
图6为电机三相电流仿真波形,系统加负载启动运行,越经过0.2 s电流波形稳定在50 A,在0.6 s负载降为0时,经过0.08 s左右的反应时间,电流稳定在30 A。
图7为电机转矩波形,因带负载,启动转矩上升至350N·m左右,0.2 s后稳定在80 N·m,负载降为0后,转矩也趋近于0 N·m。
4 结束语
由上述仿真结果可得,基于MRAS的转速估计基本能够估计出电机转速,矢量控制系统完全省略了速度检测环节,消除了速度传感器的安装带来的误差,简化了系统的构成,而且结果显示矢量控制系统具有一定的稳定性和可靠性,因此基于MRAS的速度估计将具有很好的研究价值。












评论