如何避免步进电机失步

说起步进电机,对于电气控制行业的工程师来说应该再熟悉不过了!它的误差不会长期积累,能够实现精确定位,控制比伺服简单等优点,但步进电机精确控制的前提是电机不发生失步,如何才能避免步进电机失步?
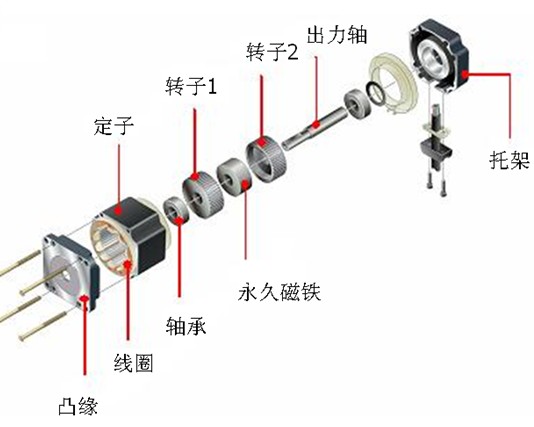
本文引用地址:https://www.eepw.com.cn/article/201607/294678.htm步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机。在未发生失步情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数并不受负载变化的影响,当步进电机接收到一个脉冲信号时,电机就按设定的方向转一个固定的角度(步进角或步距角),通过控制脉冲数和脉冲频率来控制电机角位移量及电机转速从而达到精确的开环控制。另外,步进电机每走一步所转过的角度与理论步距之间总有一定的误差,从某一步到任何一步,也总有一定的误差,但是,步进电机每转一周的步数相同,在不失步的情况下,其步距误差不会长期累积。
上面提到的都是在不失步的情况,如何才能避免失步呢?首先我们需要知道造成电机失步的因素:
1、转子加速度慢于步进电机的旋转磁场;
2、转子的平均速度高于定子磁场的平均旋转速度;
3、电机负载惯性较大;
4、步进电机产生共振。
转子加速度慢于步进电机的旋转磁场即转子速度低于换相速度时,电机会产生失步,这是因为输入电机的电能不足,产生的力矩无法使转子速度跟上定子磁场的旋转速度,从而引起失步。转子平均速度高于定子磁场平均旋转速度,这是定子通电励磁的时间较长,大于步进所需的时间,转子在步进过程中获得过多的能量,导致电机产生的转矩过大从而引起电机越步。

以上导致步进电机失步的原因实质是步进驱动器选择不当而导致,只有选择正确合适的步进驱动器才能使步进电机发挥其控制精确的优势。选择合适的驱动器需要根据电机的电流,配用大于或等于此电流的驱动器。如果需要低振动或高精度时,可配用细分型驱动器。对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。同时对于驱动电源,很多人直接使用开关电源作为驱动电源,但是,一般最好不要使用开关电源,特别是大力矩电机,除非选用比需要的功率大一倍以上的开关电源。因为,电机工作时是大电感型负载,会对电源端形成瞬间的高压。而开关电源的过载性能不好,会保护关断,且其精密的稳压性能又不需要,有时可能造成开关电源和驱动器的损坏。对于步进电机的驱动电源,可以用常规的环形或R 型变压器变压的直流电源。
步进电机产生共振是因为电机接收的脉冲频率等于步进电机的固有频率,该频率与驱动器的细分有关系。我们一般使用步进电机时,驱动器的细分能力很重要,共振范围越小越好。对于电机负载惯性较大是由于电机超载而引起,因此在使用时只需注意不要让电机过载即可避免。
要知道是否过载,我们必须了解电机的负载特性等基本参数,广州致远电子股份有限公司专门为步进、伺服系统的控制稳定性、控制精度、响应时间、负载特性以及电机性能效率等推出一套成熟的测试方案-MPT1000电机测试系统。MPT1000电机测试系统是研发人员的好帮手,生产厂商质量把控的一道闸!






评论