一种汽车电动式转向器的电控系统设计

1 引言
车辆的转向性能直接影响到整车的机动灵活性、操纵稳定性和使用经济性。多轴转向技术通过改变前桥以外的其它桥转角,在低速转弯时改善汽车的灵活性、机动性,在中高速时改善汽车的操纵稳定性。通过改变汽车瞬时出现的过多转向或不足转向,增强汽车的动态稳定性,使汽车行驶更安全,避免汽车由于过多转向或不足转向造成失控。
2 多轴转向系统的实现原理
多轴转向系统的转向控制模式按其结构和执行机构的不同可分为机械式、液压式和电子式等。目前多轴转向装置已将机械、液压、电子、传感器及微处理器控制技术紧密结合在一起。针对某三轴全路面起重机多桥转向系统电控部分进行研究。由于系统的实时性较强,故采用了较为流行的CAN 总线控制方式。本文设计了一种高性能汽车电动式转向器的电控系
统部分。
3 电控系统硬件设计
基于 CAN 总线的多轴转向系统采用模块化设计,主要由主控模块和驱动控制模块组成。主控模块根据车辆的行驶姿态和多轴转向控制策略(采用零侧偏角比例控制策略)计算出各后桥的转角值;驱动控制模块则负责转向执行过程的控制。多轴转向主控模块电控单元根据传感器采集到的前轮转角信号和车速信号,经过预定的控制策略进行处理计算,得到后桥最佳转角值,同时将各桥转角值发送到总线上。控制执行模块的电控单元,经过辨认接收到各自的数据,经过PID 控制将转角值转化驱动比例电磁阀PWM 电压信号,控制执行液压缸活塞的位置,同时通过位移传感器将实时的液压缸位移值反馈给电控单元,使得后桥各转过的角度具有一定的精确度,从而实现多轴转向的目的。
3.1 多轴转向电子控制系统的总体概述
本文所设计的多轴转向电子控制系统主要由两个模块组成,每个模块又由三部分组成:传感器、电子控制单元(ECU)和执行机构。其设计主要包括传感器与控制器的选择、信号采集系统及其处理电路设计、CAN 控制与接收电路、执行机构及其驱动电路的设计。基于CAN总线多轴转向电控系统硬件框图如图1。
3.2 传感器的选择
(1) 车速传感器
霍尔车速传感器是一种基于霍尔效应的磁电传感器,具有对磁场敏感度高、输出信号稳定、频率响应高、抗电磁干扰能力强、结构简单、使用方便等特点,从而得到广泛的应用。其结构主要由齿圈、霍尔元件、永久磁铁和电子线路等组成。其原理如下图2 所示: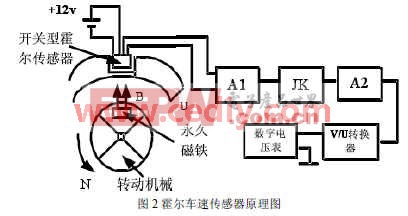
(2) 方向盘转角传感器
多轴转向控制系统中,需要前轮转角作为控制参数,由于前轮转角值较难获得,所以采用测量方向盘转角值,通过运算得出前轮转角值。
(3) 液压缸位移传感器
多轴转向控制系统中要获取后轮转角值来判断转向是否到位,由于直接测量后轮转角较为困难,而液压缸的位置与后轮转角一一对应,于是我们通过测量液压缸位移间接测量后轮转角,同时将转角值反馈回ECU 中。本文采用变阻式位移传感器。在微处理器的选择方面, 我们力求吸收国内外成熟产品宝贵经验,在进行了广泛的电子产品市场调研后,在综合性价比的基础上,本系统选用了PHLIPS 公司生产的8 位P89C52 系列单片机作为微处理器。
3.3 CAN 总线系统节点硬件电路设计
基于 CAN 总线多轴转向电控系统中CAN 总线节点的设计尤为重要。本文设计的CAN总线节点系统,采用P89C52 作为微处理器, 在CAN 通信接口中,CAN 通信控制器SJA1000,CAN 总线驱动器采用82C250。电路主要由四部分所构成:微控制器P89C52、独立CAN 通信控制器、SJA1000CAN 总线收发器82C250 和高速光电耦合器6N137。微处理器P89C52 负责SJA1000 的初始化,通过控制SJA1000 实现数据的接收和发送等通信任务。





评论