基于声光探测的汽车定位系统

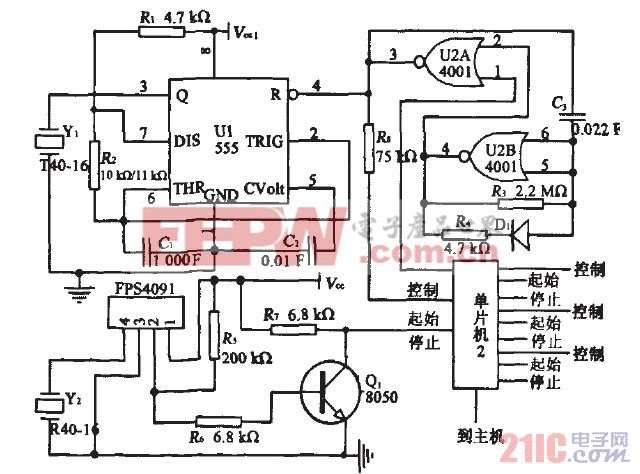
由于红外阵列由N个功能相同的红外模块串联而成,所以在制作时,以5~10个模块做成一个电路板组件,并采用插拔式安装结构,各个组件电路相同,可相互替换、任意串联,既能满足不同工作区长度的要求,也可尽量减少现场更换故障模块所需的时间。 现场安装时,需要分段校准,避免误差累积。 2.3 扫描强度处理 在大雾或强降雨天气,红外线穿透能力下降,降低了红外扫描的可靠性,通常以加大红外发射功率来解决。为此,红外扫描设置了普通、增强和超强三种扫描强度模式。普通模式的红外扫描,红外收发是“一对一”工作,同时只有1个红外模块发射,每次移动1位;增强模式的红外扫描,红外收发变为“一对二”工作,同时有2个相邻红外模块发射,每次移动1位;超强模式的红外扫描,红外收发变为“一对三”工作,同时有3个相邻红外模块发射。很显然,后两种模式的红外发射功率分别是第一种模式的2倍和3倍。后两种扫描模式的定位精度会有所降低,但最多不超过2△L。 2.4 红外抗干扰处理 由于定位装置在室外场地工作,在电路设计上应考虑对日光等背景红外线的抗干扰措施。具体采取了3项措施: (1)封闭接收头。将接收头置于带窗口箱体中,避免日光对其直接照射。 (2)动态红外线发射。日光等背景红外线一般不会有巨烈波动,因此,对红外线进行脉冲调制,以动态红外线发射效果较好。 (3)选用抗干扰接收头。电路采用了抗干扰能直射日光红外线干扰中有效检出红外线信号。为达到SBXl6i0—02接收头最佳工作点,脉冲发生器产生的振荡信号频率应在(38±0.5)kHz之间。 2.5 大跨度电子移位电路开关信号丢失处理 电子移位电路通常由约100片74LSl64串联组成,电路长达数10 m,由于分布参数的影响,造成各片74LSl64的移位时钟信号CLK的不同步,极易导致开关信号在移位过程中丢失,使扫描“半途而废”。为此,对各片74LSl64的移位时钟信号CLK,应采用并联驱动,并保证各片74LSl64的时钟信号处于同一个驱动级上,同时尽量减小电路阻抗,提高驱动电路的功率。 3 测距系统电路设计和调试 图3为测距系统电路。该电路由1个单片机和4组超声波收发单元组成,图中只画出了一组超声波收发单元。发射单元由40 kHz振荡器和门电路构成。门电路产生占空比很小的低频脉冲信号,脉冲持续时间为160 its,脉冲间隔为30~50 ms(视需要调整)。此脉冲信号一路作为振荡器的置位脉冲;另一路送给单片机,作为计时器的起始脉冲。在置位期间,振荡器输出经调制的频率为40 kHz的脉冲信号,由超声波发射头T40-16发射出去。回波的接收采用通用的FPS409I红外接收组件,只是需要把红外接收管PH302换为超声波接收头R40—16,这样在有效的测距范围,可保证接收到的信号其输出达到TTL电平。接收信号经整形放大后送入单片机,作为计时器的停止脉冲。单片机计算起始脉冲至停止脉冲之间的时间t,按照式(1)求出距离s。 图3 测距系统电路 测距系统采用了“一拖四”的结构,为避免多组超声波单元互相干扰,它们应在单片机控制下轮流工作。该电路中脉冲间隔为30~50 ms,对应测距范围约为5~15 m,如果测距范围加大,需要增大脉冲间隔。另外,该测距电路存在约30 cm的测距盲区,测距装置与测量对象间要保持30 cm以上的距离,同时单片机对起停脉冲计时时,也要避开盲区内虚假停止脉冲的干扰。









评论