混合动力汽车能量管理系统的模糊控制与仿真研究

前言
本文引用地址:https://www.eepw.com.cn/article/196860.htm环境和能源问题的日益突出,使低排放甚至零排放汽车的开发受到了广泛的关注。电动汽车以无(低)污染、高燃油经济性、高性能和低排放的优点成为当代汽车发展的主要方向。但是,电动汽车的发展需要解决两大关键问题:即能量存储和动力驱动问题,由于短期内动力电池贮能不足的问题很难解决,于是能量管理技术就成为电动汽车发展的重要部分。本文主要是对基于模糊逻辑控制的混合动力汽车能量管理系统控制来进行具体分析。
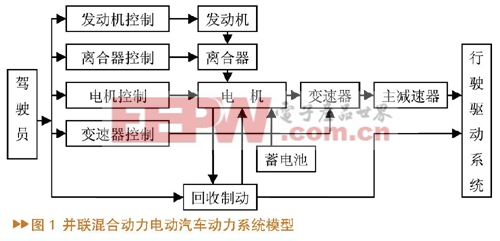
并联式混合动力汽车动力系统模型
并联式混合动力电动汽车动力系统模型,主要包括驾驶员决策、发动机、电机、蓄电池以及整车动力性计算模型等。一种前向复合并联混合动力汽车动力系统模型如图1所示。
汽车在行驶过程中,动力系统提供的驱动力用来克服汽车的滚动阻力、坡度阻力、空气阻力以及加速阻力,从而实现汽车的匀速行驶、加速或爬坡等。汽车行驶过程中,驱动力Ft、滚动阻力Ff、坡度阻力Fi、空气阻力Fw以及加速阻力Fj,可以按照式(1)计算。
![]()
式中Ttq为发动机转矩(Nm),ig为变速器的传动比,io为主减速器的传动比,r为车轮半径(m),G为作用于汽车上的重力(N),f为滚动阻力系数,CD为空气阻力系数,A为迎风面积(m2),μa为行驶速(km/h),δ为汽车旋转质量换算系数,m为汽车质量(kg),(du/dt)为行驶加速度(m/s2),ηr为传动系的机械效率。
在一定的发动机与电机复合转速n(r/min)下,经过变速器与主减速器的减速,作用到车轮上,驱动车轮转动,汽车以速度ua(km/h)(ua=0.377rn/igi0)行驶。在汽车行驶过程中,不仅驱动力与行驶阻力相互平衡,动力系统提供的功率与阻力功率也相互平衡。将行驶方程两边乘以行驶车速ua,并经单位变换,得到汽车功率平衡方程(功率单位为kW):
![]()
式中:Pe为汽车的功率,i为道路坡度。
模糊逻辑控制策略
控制策略思想
本文的控制策略就是在保证发动机最高燃油效率的前提下,提高车辆的驱动性能、满足排放法规要求,以及保持电池的充电平衡。由于道路工况和驱动条件的非线性,对于电动机何时产生辅助转矩或对电池充电的控制变得非常复杂。另外由于不同驾驶员的操作方法不尽相同,所以很难实现电池充放电平衡。模糊逻辑控制策略能解决非线性复杂问题,对于并联混合动力电动汽车的控制策略建模比较适用。
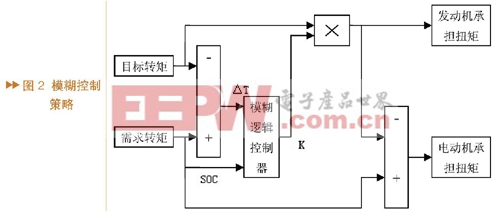
在并联混合动力汽车传动系统控制中,一般根据电池的SOC、驾驶员的踏板位置、车速及车轮所需的平均功率等参数,按照一定的规则使发动机和电动机输出相应的扭矩(或功率),以满足驱动轮驱动扭矩的要求。本文中模糊控制器的输入参数是道路总的请求转矩与发动机优化转矩的差值ΔT和电池荷电状态SOC,输出参数为控制系数K,如图2所示。
模糊逻辑控制器设计
模糊控制器采用Matlab提供的模糊逻辑工具箱设计,该工具箱基于Matlab的数学计算平台构造模糊函数,并能在此环境下建立和编辑模糊控制器,而且将设计的控制器与Simulink集成进行仿真分析。
模糊化模块
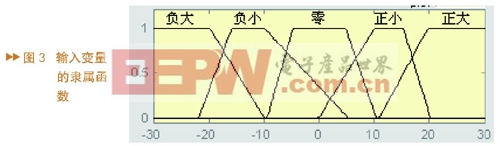
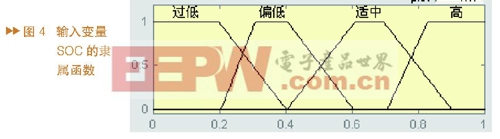
本文输入变量描述为{‘负大’,‘负小’,‘零’,‘正小’,‘正大’},输入变量SOC描述为{‘过低’,‘偏低’,‘适中’,‘高’},输入变量的隶属函数分别如图3、图4所示。输出变量K值为{0,0.75,0.8,0.85,0.9,1,1.05,1.1,1.2,1.25},由于输出采用单值函数表示,因此推理方法采用Takagi-Sugeno类型,这种类型较为特殊,它将去模糊化结合到模糊推理中去,最后输出为精确量。
模糊控制规则表的建立
本文中模糊控制器采用双输入单输出结构(MISO)。根据条件,建立“IF-THEN”型的规则库,该规则库建立的原则就是在尽量保证电池充放电平衡的条件下,使发动机转矩工作在最小燃油消耗区域。因此可以建立模糊逻辑控制表,见表1。

从表1中可以看到第一条规则可以解释为:当ΔT为“负大”,且SOC值为过低,则输出K为1,表示发动机工作在目标转矩,多出来的能量用于给电池充电。如果用语言来表示则为:IF(ΔTis负大)and(SOCis过低)then K is 1。表中其它数值可以用类似语言来描述。
反模糊
反模糊化模块采用面积中心法作为反模糊策略。从多能源控制目标看,并联混合动力汽车的主要控制目标是发动机和电动机的转矩(或功率)分配问题,如何合理优化分配转矩是控制策略的重要内容。模糊逻辑是一种比较合适的控制策略,具有较好的鲁棒性,能实现非线性、多目标和多参数的控制。模糊逻辑控制,能将控制逻辑的隶属函数及参数权值进行优化,以得到更佳的结果。
建模、仿真结果与分析
基于strong>span onmouseover=_tipon(this) onmouseout=_tipoff()>a href=http://www.eefocus.com/search/forsearch.php?word=Matlab%7C0 class=eefocus-src-key target=_blank>Matlab/a>/span>/strong>/Simulink的混合动力系统建模
ADVISOR模型代码具有开放性,可以很容易对其内部模型进行研究。在研究与掌握ADVISOR车辆仿真系统结构组成的基础上,对它进行二次开发是可行的。在软件原有的并联式混合动力整车各模块基础上,对相关模块及对应参数加以修改,搭建新开发的虚拟样车系统结构,并修改它在MATLAB/SIMULINK下界面,使其更具可读性。
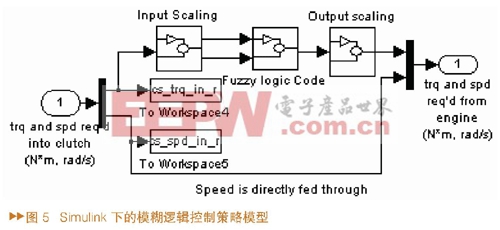
混合动力汽车前向仿真模型,包括驾驶员模型、车辆控制器模型、发动机模型、电机模型、电池模型、离合器模型、变速器模型、主减速器和差速器模型、轮胎模型和车辆动力学模型。控制策略模型如图5所示。
整车性能仿真结果与分析
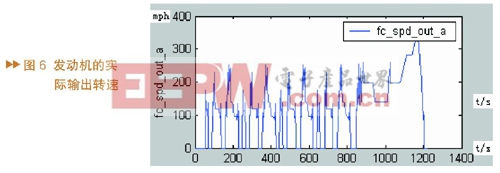
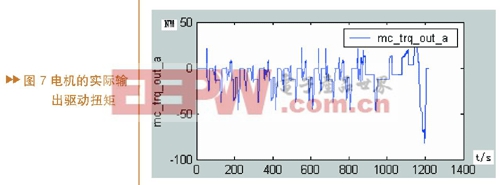
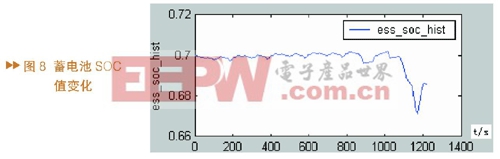
本文采用欧洲城市道路循环ECE_EUDC。仿真参数主要有:整车质量1800kg,风阻系数0.335,迎风面积2.1m2;发动机采用电喷汽油机,排量1.0L,功率41kW;电动机采用交流感应电机,峰值功率为25kW,额定电压144V,效率0.9;蓄电池系统由25块铅酸电池组成,容量为18Ah,质量为167kg,总行程10.93km,时间1225s,最大速度120km/h,行驶期间共计13次停车。
仿真结果如图6、7、8所示。从图6中可以看出发动机的转速是伴随着车辆在道路循环上的状态而变化的,在道路循环的停车时间,发动机处于关闭状态,以降低油耗,在加速时由电动机提供辅助功率,在减速时电动机当作发电机应用回收能量。从图7中可以看出在道路循环要求汽车加速时,电机提供辅助驱动;减速、停车时,电机回收制动。从图8中可以看出SOC也是动态变化的,最大值为0.716,最小值为0.674,上下波动为0.042,可以看到波动比较小,同时最终SOC值为0.684,基本上实现了在一个循环内的充放电平衡。从发动机工作点和电池SOC的变化范围看,模糊逻辑控制策略模型能将发动机控制在最佳燃油线附近,并实现电池SOC变化在合理的范围内。
结束语
混合动力汽车是近年研究和开发的热点,如何实现能量的合理分配是解决问题的关键。由于在混合动力汽车控制中存在许多影响参数,这些参数的函数关系大多是非线性的,模糊策略具有较好的鲁棒性,能解决复杂的非线性问题,实现能量的合理分配。本文的仿真结果表明,在混合动力车中利用模糊控制器控制能量的流向及其在内燃机、电动机和电池组之间的分配关系,不仅满足减少油耗、降低排放的要求,而且提高了整个驱动系统的效率,为更先进的控制策略和混合动力系统的研究和开发提供了一些参考。




评论