基于电磁场检测的寻迹智能车系统设计

摘要:介绍智能车竞赛中电磁组的设计思路,论述了基于变参数的PD算法的信号处理方法;分析了传感器布局对转角的影响,提出直接采集交流信号的寻迹方案,并验证了该方案的效果。实验表明:该处理方法实现简单,能够比较精准、快速地跟踪通电导线的轨道。
关键词:磁场;智能车;传感器;PD算法
1 设计原理
1.1 磁场理论
根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。智能车竞赛使用路径导航的交流电流频率为20 kHz,产生的电磁波属于甚低频(VLF)电磁波。交变磁场分析复杂,并且赛道导航电线和小车尺寸远远小于电磁波的波长,电磁场辐射能量很小,能够感应到电磁波的能量也非常小。所以可将导线周围变化的磁场近似地看作缓变的磁场,按检测静态磁场的方法获取导线周围的磁场分布,进行位置检测。
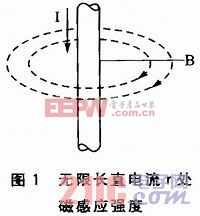
由毕奥一萨伐尔定律可知,通有稳恒电流I、长度为L的直导线周围会产生磁场,距离导线距离为r处的磁感应强度为:
1.2 寻迹原理
基于不同物理效应的磁测量传感器很多,要根据被检测磁场的性质和要求,使用不同的磁场传感器。感应线圈对磁场的变化灵敏度较高,同时也可根据被测磁场的形态和分布选定线圈形状和几何尺寸。选用灵敏度更高的线圈作为识别信号的传感器。
本设计中导线通过的电流频率为20 kHz,且线圈较小。设线圈中心到导线的距离为r,并认为小范围内磁场分布是均匀的。再根据图1所示的导线周围磁场分布规律,利用法拉利定律,线圈中感应电动势可近似为:
![]()
即线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的距离。故导线左右两端传感器的电压值可表示为: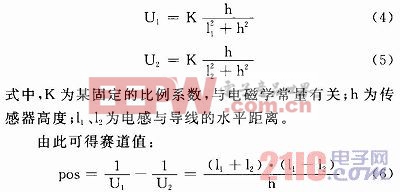
式中,(l1+l2)为定值,计算出的pos值为以传感器轴中心为坐标原点的赛道位置值。
2 磁导航智能车系统
磁导航智能车系统主要分为主控模块、路径信息采集模块、电机驱动模块和电源模块等。磁导航智能车结构框图如图2所示。
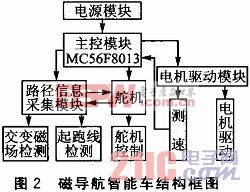
系统磁场环境为埋设在跑道中通过20kHz、100 mA交变电流的导线产生的交变磁场。
3 赛车布局分析及硬件电路
3.1 传感器布局
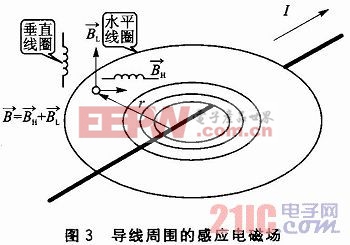
根据感应线圈安放位置的不同,可将感应方向分解为各分量。如图3所示,当线圈为水平安置时,线圈中检测到的主要是水平方向的磁场分量;线圈为垂直安置时,线圈中检测到的主要是垂直方向的磁场分量。通过对不同方向磁场分量的检测,可以获得磁场的强度和方向。







评论