基于在线软件工具的数字电源UCD92xx反馈环路调试指南

摘 要
本文引用地址:https://www.eepw.com.cn/article/175780.htm基于UCD92xx 的非隔离数字电源系统由控制芯片和功率级芯片构成。功率级芯片由Mosfet 驱动和功率Mosfet组成,包括独立的Mosfet 驱动(如UCD7232),或者集成Mosfet 的功率级芯片(如UCD7242 和UCD74120等)。通过与UCD92xx 配套使用的在线工具Fusion Digital Power Designer 可以在线调节反馈环路,提高环路调节的效率。本文在一款基于UCD9224 和UCD74120 的数字电源板上演示如何在线调节环路。
1、引言
设计一款基于UCD92xx 的非隔离数字电源,需要首先选择合适的控制芯片和功率级芯片。当功率级芯片选用UCD74120 时,因其内部集成了驱动器和BUCK 上下管,外围只需增加电感和输出电容即可。然后可以使用在线软件工具对整个电源系统进行配置和调节。
1.1 数字电源控制器UCD92xx
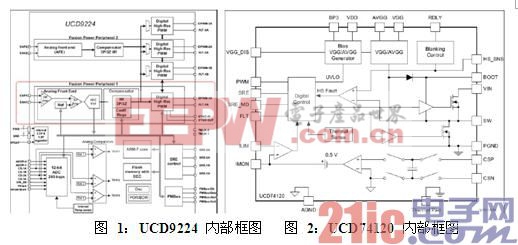
UCD92xx 是内部集成ARM7 核的非隔离数字电源控制器,可以灵活的配置为多路或多相模式,以UCD9224 为例,可以配置其为双路输出或单路四相并联输出等。 图1 是UCD9224 的内部框图,关键模块包括:
● Fusion Power Peripheral:包含输出电压误差的采集,环路补偿及DPWM 的输出等;
● ADC 采样模块:包含10 个ADC 接口,用来对外部信息(如温度,电流)和内部信息(温度)进行采集;
● Analog Comparators 模块:包含三个模拟比较器,用来完成对过流等故障的快速保护;
● ARM-7 模块:包含ARM-7 核,Flash 和晶振等;
● PMBUS 模块:通讯接口,用来与上位机进行通信;
● 其它:包括SRE 控制等模块,用来控制BUCK 运行于同步整流还是非同步整流模式;
1.2 功率级芯片UCD74120
UCD74120 是一款集成了驱动器和BUCK 上下管的功率级芯片,最大输出电流为25A,内部框图如图2。该芯片同时具有电流检测及上报(给UCD92xx)功能,过流保护(输出电流的过流保护和BUCK 上管过流保护),欠压保护,过温保护及故障上报功能(通过FLT 管脚)等。
1.3 在线调试软件Fusion Digital Power Designer
TI 提供与UCD92xx 配套的在线工具集:Fusion Digital Power Designer,包括offline 模式和online 模式。Offline模式用来离线配置,而online 模式可以在线对UCD92xx 配置和监控。本文涉及的在线环路调节是使用online 模式软件。图3,4,5,6 显示的即为该软件工具的四个主要功能模块。
● 配置:如图3,实现对输出电压幅值及过压点/欠压点,上电/下电斜率,输出过流点等的配置;
● 设计:如图4,由客户选定主要功率器件及外围元件参数,再由Fusion Digital Power Designer 实现对数字电源环路的配置及模拟仿真;
● 监控:如图5,在线对输出电流/电压,输入电压等的实时监控;
● 状态:如图6,记录数字电源的各种故障,如过压,过流,欠压等,便于故障定位。

1.4 演示环路调试的数字电源板
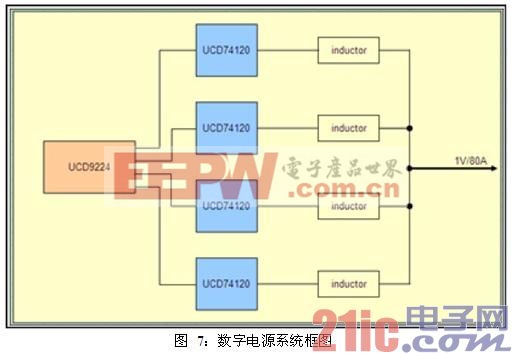
本文在一款基于UCD9224 和UCD74120 的数字电源单板上实际演示环路的调试,包括对应的实测波形。该电源的系统框图如图7 所示,包含了四个功率级,采用交错并联模式输出。系统的规格为:输入电压12V,输出电压1.0V,最大输出电流为80A。
2、环路在线调试细则
借助于Fusion Digital Power Designer-online 在线工具可以完成环路的配置及仿真,然后根据实测结果再微调,最终可以得到一个理想的环路配置,整个过程中无需调试硬件。
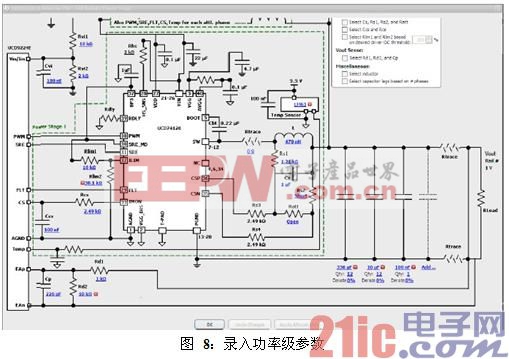
2.1 录入功率级参数
在图3 的设计界面中有“Edit Full Power Stage in Schematic”按钮,点击后弹出界面8。在该窗口中,用户需要输入实际使用的硬件参数值,包括电感(及DCR),电容,反馈电阻等。
上述输入的这些参数用来完成整个闭环环路的模拟与仿真。因此,当录入的参数越是与实际参数一致,则仿真得到的环路参数也越是与实际相符。
录入完毕后即可保存退出。
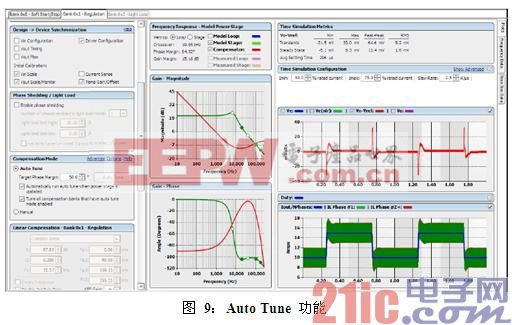
2.2 使用Auto Tune 功能
录入参数完毕后,就可以开始进行环路的补偿及配置。首先可以使用Auto Tune 功能,这也是最为简单的环路配置方式。即,点击“Compensation Mode”中的“Auto Tune”,此时图9 中的中间上部区域会显示配置后的环路参数:截止频率19.05kHz,相位余量64.32°,增益余量15.16dB。该功能使用客户所输入的硬件参数,以及对相位增益的要求,来自动配置环路补偿。使用该功能后,Fusion Digital Power Designer 会进行自动配置环路补偿,客户无法更改环路配置。
图9 右侧区域是基于当前配置的环路参数模拟动态后得到的结果。其中动态条件是可以自行输入的,最终的动态纹波峰峰值在右侧的上部区域有显示。
如果对这个环路参数及模拟得到的动态纹波峰峰值比较满意,可以保留当前参数。环路调节完毕。
2.3 手工优化参数配置
假如使用Auto Tune 得到的参数不理想或者想进一步优化,可以点击“Compensation Mode”中的“Manual”,然后通过调节Linear Compensation 和Non-linear Compensation 得到一个更为理想的环路配置。
1. Linear Compensation 的调试方法
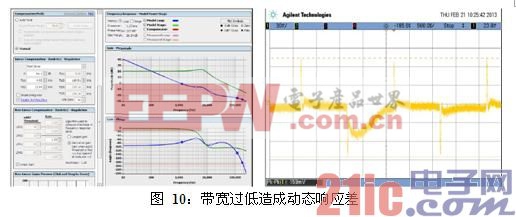
如图10,显示的是某次环路配置结果,没有使能Non-linear 功能。可以观察到,其截止频率为1.27K。此时测试到的动态波形(测试条件为:20A~40A~20A,斜率为2.5A/us)的峰峰值为159mV,超出了所要求的100mV指标。
还可以观察到动态波形的恢复时间也超出了要求的范围,这是因为过大的动态纹波峰峰值导致了EADC 输出饱和,其输出值被钳制在一个固定值(该值与AFE 的Gain 有关系),因此环路补偿电路只能根据该饱和值(小于实际输出值)进行补偿,由此带来了较长的恢复时间。超长的恢复时间的根因是动态纹波峰峰值过大。
下面将对上述不太理想的环路进行优化,措施包括调整低频增益,第一零点,第二零点和第二极点。
在进行手动调节前,需要选定调节方式。目前有三种方式可选:1)Real Zeros 模式;2)Complex Zeros 模式; 3)PID 模式。其中Real Zeros 模式最为贴近常规模拟电源的环路调节方式,下文主要针对此种方式阐述。
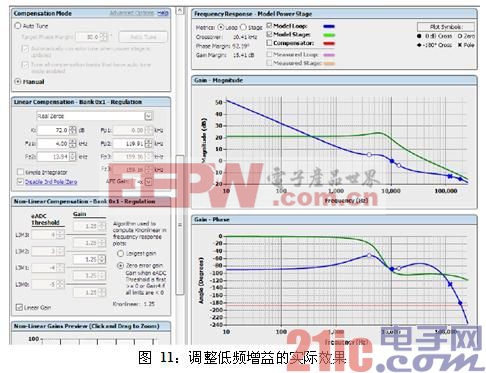
1) 调整低频增益
观察图10 中的波特图,功率支路的双极点位于约6KHz 处,环路的两个零点分别是4KHz(Fz1)和13.94KHz(Fz2),但是两个零点的位置都在截止频率的右侧,因此零点对截止频率的贡献较小,可以尝试增大低频增益。
K 表示低频增益。将K 值由原来的61.1dB 修改为72dB 后,截止频率变为10.41KHz,有了明显的改善,且位于两个零点之间。增益余量和相位余量亦满足环路稳定准则的要求。
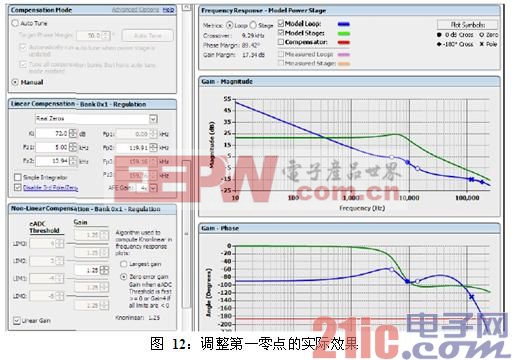
2) 调整第一零点和第二零点
第一零点为4KHz,位于双极点的左侧。即,环路增益受到到第一零点的影响而增强后,随后会受到双极点的影响而衰弱。因此,此时右移第一零点,将会减小截止频率,相位余量也会被减小;反之,截止频率和相位余量会继续变大。例如,当将第一零点修改为5Khz 后,截止频率减小到9.29KHz,相位余量减小为89.2°。
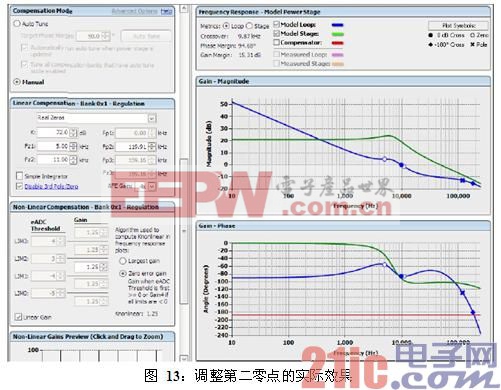
第二零点为14KHz,位于双极点的右侧,接近截止频率。因此,当左移该零点,原截止频率处的环路增益得到增强,截止频率会变大。第二零点处的相位会被提升,当截止频率变大而接近第二零点后,相位余量也会因此变大。例如,当将第二零点修改为11KHz 后,截止频率变大到9.87KHz,相位余量增大到94.68°。
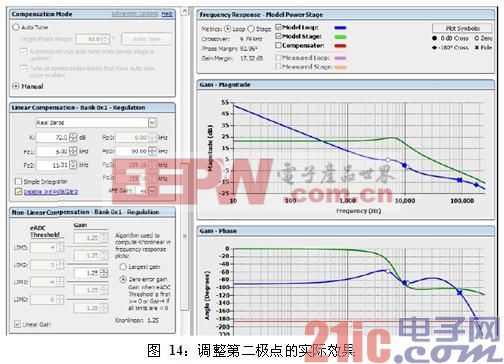
3) 调整第二极点
观察图13 中的波特图,增益余量对应的频率为200KHz,而第一极点的位置是119.9KHz。因此,如果想进一步增大增益余量,可以左移第一极点。此时,增益达到200KHz 区域后会下降的更多,增益余量得以增大。
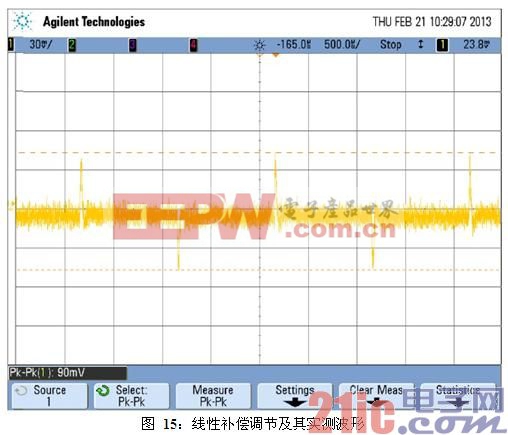
至此,低频增益,零点和极点都有所调整。使用当前环路参数测试到的动态波形见图15,可以观察到,动态纹波的峰峰降低为90mV,已经满足指标要求。
2、Non-linear Compensation 的使用
非线性补偿的原理是在环路补偿环节加入非线性控制,对大信号响应做进一步的控制。即,当输入到环路的误差量超出一定范围后使用更大的增益值,可以有效降低动态波形的峰峰值,且不影响常态运行时的环路标。
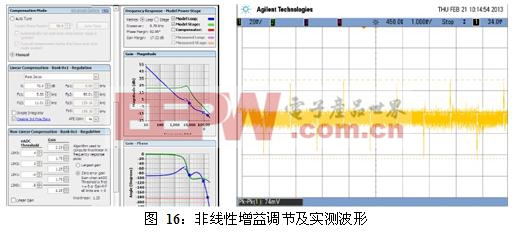
以图16 为例,当误差量在Limit1 和Limit2 之间时,环路增益值为1.25;当超过Limit1/2 但为超出Limit0/3时,增益值为1.75;当超出Limit0/3 后,增益值为2.25。同时,可以观察到,使能非线性补偿后环路的截止频率,增益余量和相位余量与未使用非线性补偿前是一致的。
上文提到的Limitx 中的数值针对的是EADC 的输出(为无单位的纯数值)。EADC 将参考电压和输出电压之间的差值(Vref-Vout)转化为数字化信号。因此,超出Limit2/3 的数值表示输出电压低于参考电压,也即对应于输出电流上跳的动态响应。而低于Limit1/0 的数值表示输出电压高于参考电压,也即对应于输出电流下跳的动态响应。最终,动态纹波的峰峰值降低到了74mV,较未使用非线性补偿变小了了约20%。
2.4 环路参数调试完毕的保存及生效
环路参数确定后,点击“Write to Hardware”按钮可以保存当前参数。此时,会弹出一个新的窗口,显示用户刚刚编辑的数据(Original)和实际写入到芯片的数据(New)。二者存在的轻微差异主要是由于模拟到数字转化的量化误差导致的。
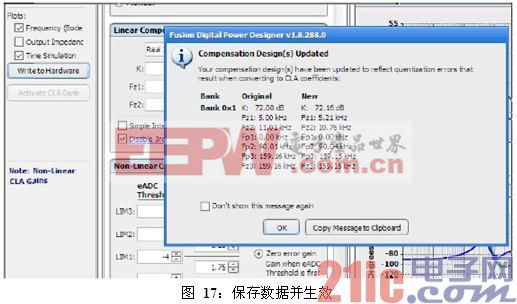
虽然将“New”所对应的数据写入到了芯片中。但需要注意的是,此时UCD9224 实际使用的环路参数并不是上述数据。当只有当点击“Activate CLA Bank”按钮后才会使UCD9224 使用“New”所对应的数据。
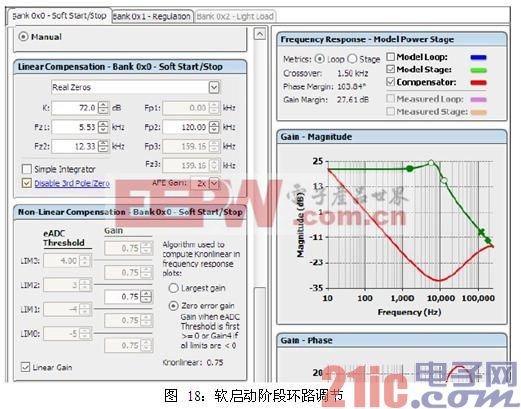
3、软启动阶段对应的环路调试
UCD92xx 的环路补偿电路对应有2 套参数,分别在输出电压软启动阶段和输出电压正常运行时使用,给应用带来了极大的灵活性。通常,软启动阶段的环路响应可以略慢于正常运行时的环路响应,防止在起机过程中出现过冲等问题。
图18 是软启动阶段的环路配置,与正常运行时的环路配置相似。需要注意的有如下几点:
1. 尽量保证零极点的位置与正常运行时环路的零极点一致;
2. 可以通过将AFE 的Gain 修改为2X 或将Non-linear 的中间Gain 改为0.75 来降低环路带宽;




评论