智能巡线小车的多模式速度控制系统

摘要:介绍了基于Freescale HCS12系列单片机的智能巡线小车多模式速度控制系统的设计方案。该速度控制系统主要由直流电机驱动电路、速度检测模块和无线通信模块构成,包含四种速度模式。介绍了速度控制系统的总体结构,并分析了其主要模块的工作原理。介绍了软件思想和程序设计流程图。实验结果表明,该多模式速度控制系统保证了智能巡线小车具有较好的稳定性和快速跟随性。
关键词:单片机;多模式;制动;稳定性;快速跟随性
引言
目前,设计出具有智能化的产品已经成为商家开发产品的目标之一,也是学生课外科技活动的热点之一;其中,专门针对具有自主巡线功能的智能小车的设计更是数不胜数,但大多数智能巡线小车只是完成了“智能化”所要求的各部分的功能,在小车速度的稳定性和快速性上考虑的相对比较少。本文主要针对具有自主巡线功能的智能小车,设计出了一种多模式速度控制系统,可以使智能小车具有较好的稳定性和快速跟随性。同时,该速度控制系统的多模式设计思想也可以用在以其它系列单片机为控制核心的智能模型车上。
1 控制系统原理
多模式速度控制系统的速度模式有4种:1、开环加速模式2、反接制动模式3、能耗制动模式4、速度闭环运行模式。系统模式通过速度测量值与给定值的偏差范围进行选择,速度给定值由前方传感器检测到的路径形状进行设定,而偏差范围与模式选择的关系根据电机自身的特性曲线和智能小车实际运行情况进行设定。
多模式速度控制系统由HCS12单片机、直流电机驱动电路、直流电机、速度检测模块和无线通信模块组成。单片机产生的PWM波通过由H桥组成的驱动电路来控制直流电机的输入电压大小,速度检测模块通过旋转编码器把电机的转速转换为单位时间内的脉冲个数,无线通信模块实现对速度控制系统相关参数的实时监测与调整,主要用于系统的调试和开发。整个速度控制系统的电源均由一节7.2V镍镉电池提供,控制系统原理图如图1所示。系统中使用低差压稳压器LM2940将7.2V电源变为5V稳压电源输出,可为单片机、速度检测模块和无线通信模块等提供相应的电源,也可减少电池电压不稳定给控制系统各个部分带来的不良影响,保证了控制系统的稳定运行【1】。
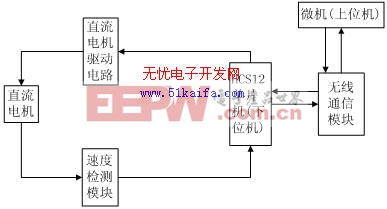
图1 控制系统原理图
2 控制系统硬件设计
2.1 直流电机驱动电路
系统中采用的直流电机型号为RS―380H。直流电机驱动采用飞思卡尔公司的5A 集成H 桥芯片MC33886。MC33886芯片内置了控制逻辑、电荷泵、门驱动电路以及低导通电阻的MOSFET 输出电路,适合用来控制感性直流负载,可以提供连续的5A 电流,并且集成了过流保护、过热保护、欠压保护。直流电机驱动电路如图2所示。

图2 直流电机驱动电路
通过控制MC33886 的四根输入线可以方便地实现电机正转、反转、能耗制动及反接制动。图3为经过简化的H 桥电路,当S1、S4 导通且S2、S3 截止时,电流正向流过电机,电机正转;S2、S3 导通S1、S4 截止时,电流反向流过电机,适当利用这个过程可以使电机处于反接制动状态,迅速降低电机速度;当S3、S4导通且S1、S2 截止时,没有电源加在电机上,可认为电机一端直接与另一端连接在一起,此时电机处于能耗制动状态。









评论