带增益调度的风力发电变桨距控制研究
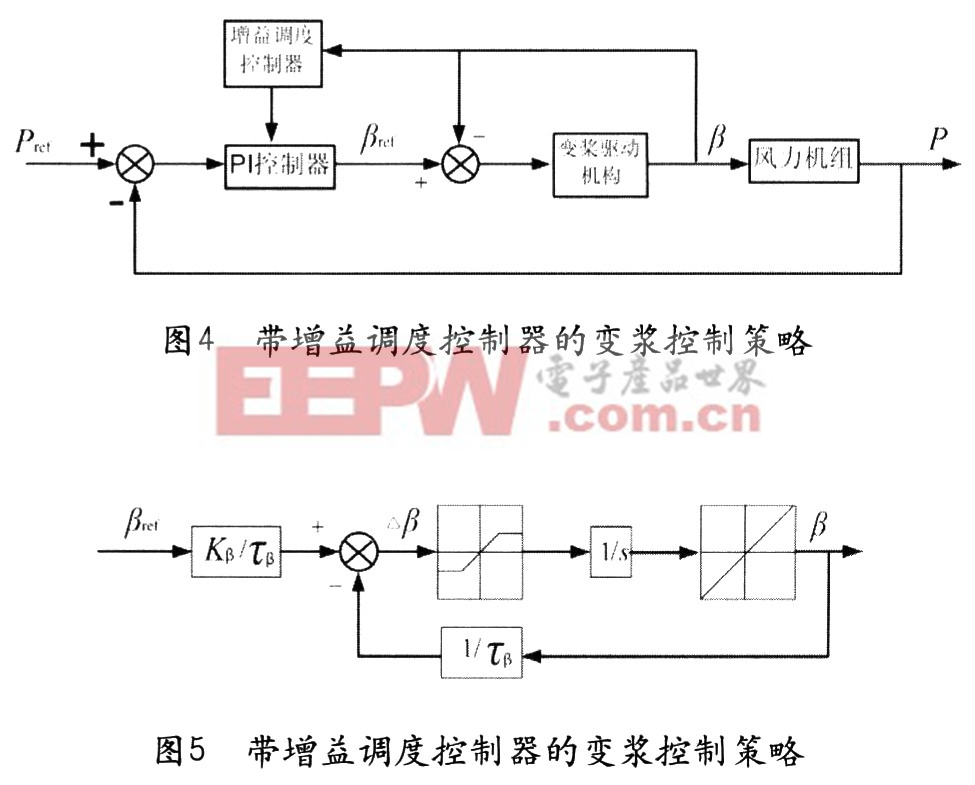
图5为变桨执行机构模型,其中由控制器给出桨矩角参考值βref,并与实际β比较得出△β,通过变矩驱动机构改变桨距角。由于大容量的风机桨叶重达数吨,考虑到调节器疲劳,桨矩角的变化速率要有限制,且其角度也有限制,即其动态特性是在桨矩角和桨矩速率上都有饱和限制的非线性动态,当桨矩角和桨矩速率小于饱和限度时,桨矩动态呈线性。
变桨执行机构的数学模型可以描述如下:

3 变桨控制仿真
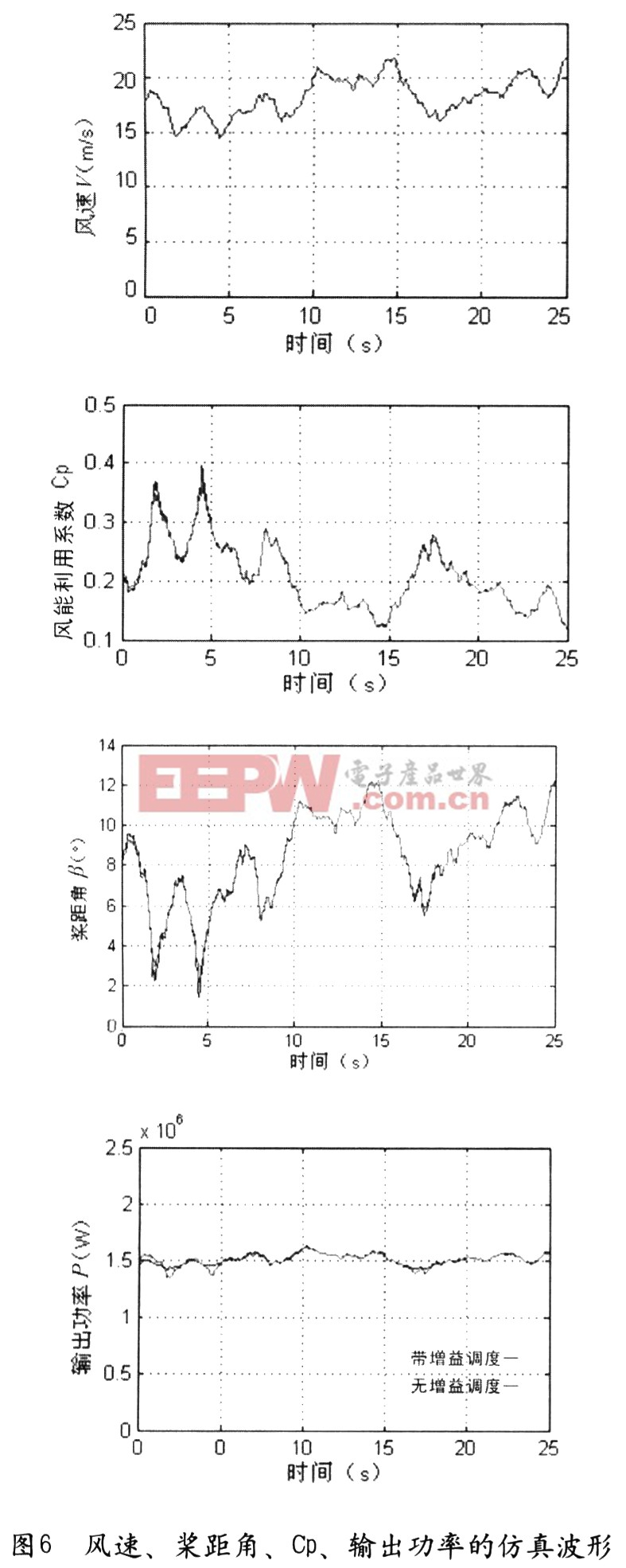
本文研究的重点是风力机在额定风速以上的变桨控制,所以仿真区域选定在风速高于额定值且风速变化较大的阶段,在此阶段,捕获的风能变化量引起的转速变化通过改变发电机转矩来平衡,且由于风轮的大惯性,可以认为风轮和发电机转速保持不变。仿真中用到的风力机组参数有:机组额定输出功率l 500kW,额定风速14m/s,风轮半径35m。图6是对两种控制测量进行仿真得到的仿真波形。
从图6中可以看出,用机组输出功率来控制桨距角可以满足变桨控制的需要。在额定风速以上,通过变桨距控制可以在风速增大时调大桨距角,减小风能利用系数,限制风机对风能的捕获,而在风速减小时通过调小桨距角来增大风能利用系数,使机组的输出功率一直保持在额定值。
4 结束语
从仿真结果中可以看出,两种控制策略都可以满足变桨控制的控制目标,但是带增益调度控制器的控制策略有更好的控制效果。在风速高于额定较多的较大风速阶段,两种控制策略的控制效果相差不大;但在风速更接近额定,所需桨距角较小的阶段,带增益调度的控制策略使桨距角变化更加灵敏,可以输出更大功率,并且输出功率更加平稳。
















评论