实时控制系统中数值外推与平滑研究

1 引言
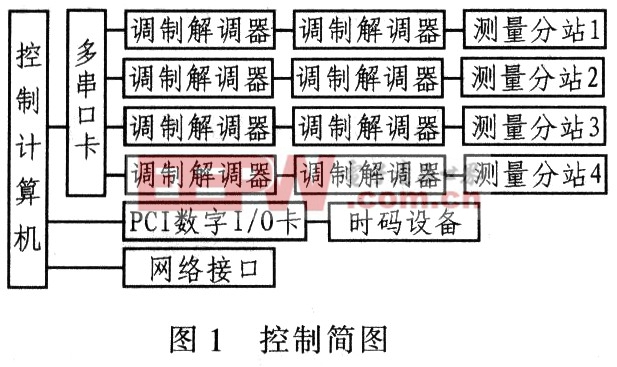
大型航天类项目中多跟踪器互为引导源在任务中经常使用的,某项目控制简图如图1所示。中心站完成同4个测量站之间的双向通讯及指挥控制,并完成与指控中心的远程控制命令转发功能。在任务状态,当任意一个测量站失去跟踪目标时,要求中心站转送给该站其他引导信息,这些引导信息为:①指控中心来的实时其他测量设备信息②中心站本身计算的两两测量站(已跟踪上目标)之间的交会计算出的弹道信息;③存储在中心站内的理论弹道信息。在实验中发现,中心站计算两两测量站交会轨道后再传给另一未跟踪上目标的测量站后数据有延迟,这种延迟由以下原因引起:中心站首先接收到各测量站信息,进行实时计算,再传回给各测量站,其工作时间间隔为50 ms,但测量分站收到这个交会计算的数据时.却发现有125~170 ms的延迟,测量分站希望使用实时测量其他分站的信息,要求中心站能将数值外推并传出,以解决时延问题。
2 数据外推的数学模型
因为中心站交会计算后可能出现野值,交会计算的基础是两个测量设备同时看到目标,并不是任意位置都可交会计算,有时测量设备通信误码也可能产生野值,所以首先要剔除野值,假定计算出的交会弹道为x、y、z,i表示实时位置,那么i-1表示前一点位置。对任意一个x,将其视为某一关于时间的曲线γ、z同理。如果已知x前几点的值,希望拟合出一曲线,可以预测未来x的值。最佳拟合曲线为最小二乘拟合曲线。
设拟合曲线分别为:
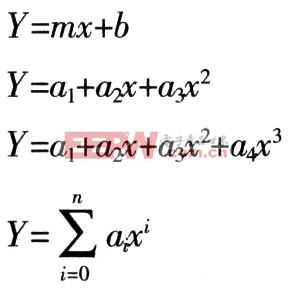
为便于理解.以二阶方程为例。令曲线拟合方程为:
![]()
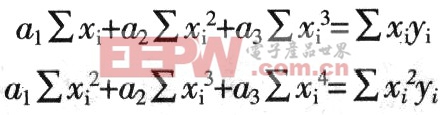
令(xi、yi)为观测数据值,又令Vi=a1+a2xi+a3xi2-yi,Vi表示计算值和观测值的残差,若要∑Vi2最小,需要:
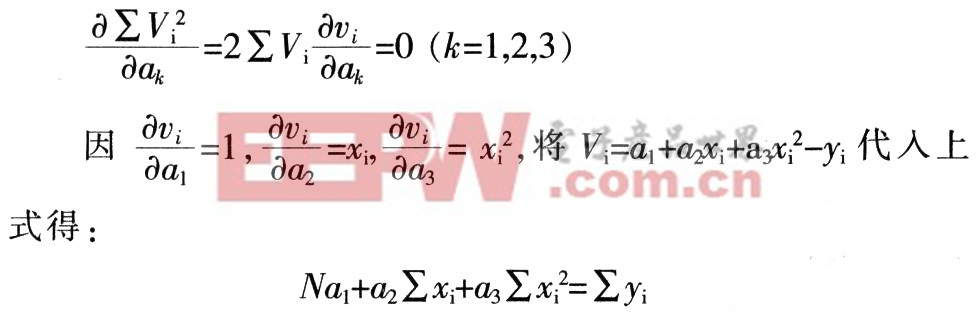
式中:i=1,2,3,…N。
由这个方程组解出a1,a2,a3,从而得到曲线拟合方程Y=a1+a2x+a3x2。
工程中的计算观测值为(Ti,yi),其中,Ti为时间,yi为坐标
值。在系统中,x轴表示目标偏离飞行方向的程度,y轴为目标的飞行方向。高程为z轴正方向,在整个空间坐标,y、z分别为速度和加速度的二次函数,用二阶曲线拟合方程实现,x基本不变,可以认为是一次线性函数,因此采用一阶曲线拟合方程来实现。
3 关于野值的剔除
假定坐标值非跳跃式变化,属于渐进变化。假定过去决定坐标值的因素也决定坐标值未来的发展,其条件不变或变化不大。即假定未来和过去的规律一样。
但数据并不都是遵循上述两个假定,这就要求必须对数据进行错误统计,选取适当的数学方法,对数据进行“去坏留好”处理,也就是数据的野值剔除。











评论