基于CAN 总线的网络化运动控制系统的研究

1引言
本文引用地址:https://www.eepw.com.cn/article/163650.htm运动控制系统是以机械运动的驱动设备―电动机为控制对象,以控制器为核心,以电力电子、功率变换装置为执行机构,在自动控制理论指导下组成的电气传动控制系统。在电气时代,电动机一直在现代化的生产和生活中起着十分重要的作用。在近年来,由于半导体制造设备等相关的电子制造设备市场大幅成长,而使得机器设备上的运动控制系统出现了以下几点技术需求:
(1)多轴运动控制。机器设备因自动化程度提高而使得单一机器上所需要的轴数增多,一台设备上十几轴是常见的事情。在轴数变多后,如何协调各轴动作就是一个重要的课题。
(2)体积要小。由于厂房空间的限制,机器的体积要求越小越好,机器内控制器的体积也就被要求愈来愈小,相对的走线空间也愈来愈小。
(3)要更精确。随着半导体制程已经精密到100nm一下,在制程及检测相关设备所要求的运动精度也要更精确,其它如LCD设备,SMD制程设备也有相同要求。
(4)要更稳定。因为所有设备的投资经费庞大,系统停机的成本就更显的突出,因此所有机器设备制造商都必须追求系统的稳定性。同时也必须考虑在组件损坏要维修时,必须能快速替换且不出差错。
综合以上几点的需求分析可以看到,既要在一个控制器内进行多轴运动控制,又要控制器的体积更小,配线和维修要更容易,这些条件看来是相冲突的。可以这样说,现场总线技术便是应这些新机器设备的需求而产生的。
2现场总线运动控制系统通信特性
用于运动控制的现场总线有两种通信控制策略:事件触发和时间触发。事件触发中,控制单元检测到事件发生后,根据预定的算法计算出正确的应答,然后将应答信息发送给数字伺服驱动器。从事件发生到应答信息的接收之间的延时必须是有限的,也就是最大值必须是可知的,它的值就是通信协议的实时性指标。但是,事件触发中的事件是随机的、不可预知的,所以导致现场总线通信的不确定性,系统中的各个站点会争用传输介质,导致通信的冲突和不可靠,很难保证高的实时性。事件触发通常是非周期性的,使用非周期性数据传输实现最为简单,但是也可以用周期性数据传输实现,此时,就必须标识哪个周期的数据为有效数据。
时间触发通常是周期性地进行的,控制单元周期性地计算出控制数据,然后及时发送控制数据给伺服驱动器。控制和通信是通过一个全局时钟进行驱动的,系统的行为不仅在功能上得到确定,而且在时间上也是确定的,各站点不会争用传输媒介,整个系统是可靠的。时间触发控制中的通信周期时间应该等于控制周期时间,或者通信周期时间能够被控制周期时间整除。周期性的时间触发中,通信周期时间必须固定,不能有明显的波动,即数据传输必须有确定性,也称为实时性。
总体而言,用于运动控制的现场总线通信协议的性能要求有三点:
(1)可靠的通信,以适合工业现场恶劣的环境;
(2)数据传输的实时性。周期性数据传输和非周期性数据传输都必须有很高的实时性,响应时间通常为(1~10)ms。
(3)命令执行和状态反馈的同步性。为了达到各坐标轴的同步运动精度,需要各轴在收到命令值之后必须在同一时刻同时执行位置控制指令和同时采样当前位置,发送给控制单元。
CAN总线(ControllerAreaNetwork控制局域网络),是一种普遍的应用。通过CAN总线进行数据传输与控制,使伺服电机的性能更加稳定,能更好更灵活地地应用于运动控制系统中。
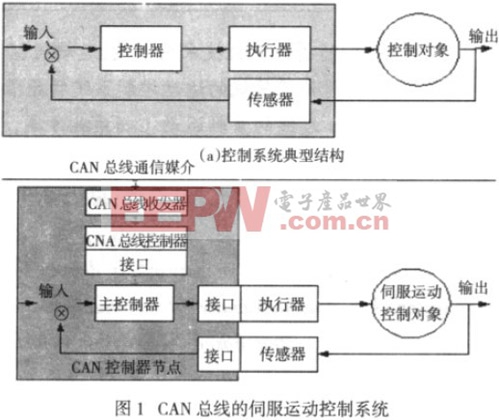
如图1所示,基于CAN总线的运动控制系统与控制系统典型结构相比,有两个显著的特点。第一是其控制对象为伺服运动控制对象,第二是其网络化控制器包括CAN总线通信媒介和CAN控制器节点两部分。多个CAN控制器节点通过CAN总线通信媒介平行互联为一个单层结构的基于CAN总线的伺服运动控制系统。当需要更多轴运动控制时,只需要简单的再增加新运动控制节点,把新的运动控制节点作为新的CAN总线节点挂接到CAN总线上就可以形成一个分布式多轴运动控制系统,而且无需在硬件上对原有的运动控制节点做任何的修改。也可通过互联网关与IE(IndustryEthernet)或Intranet/Internet上下互联为一个多层结构的网络化伺服运动控制系统。











评论