交流电机控制系统的控制算法综述
模糊控制作为一种智能控制技术,是模糊集合理论应用的一个重要方面。其主要思想是吸取人类思维具有模糊性的特点,通过模糊逻辑推理来实现对众多不确定性系统的有效控制。其设计核心是模糊控制规则和隶属度函数的确定,其一般结构如图1所示。本文引用地址:http://www.eepw.com.cn/article/163605.htm
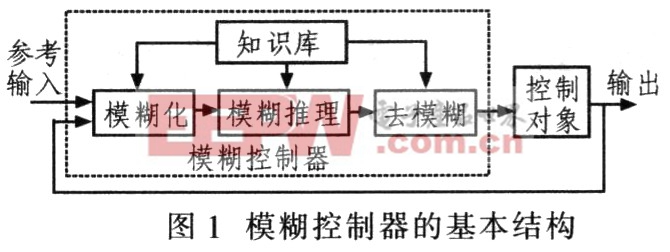
模糊控制的不足之处:本身消除稳态误差的性能较差,难以达到较高的控制精度。目前,模糊控制在交流控制领域的应用研究取得一些成果,但仍存在有待进一步研究的问题,如基于模糊控制的交流控制系统的稳定性分析,如何保证系统的稳定性;模糊控制规则难以确定,对不同的电机和运行环境,模糊规则需要分别设计;缺乏系统而有规律的模糊规则设计方法等。
2.3 神经网络控制
人工神经网络是依据人脑生物微观结构与功能模拟人脑神经系统而建立的模型,其主要功能是模拟人脑的思维方式丁作,具有自学习、并行处理和自适应等能力。利用神经网络优秀的学习和非线性逼近能力,提出许多基于神经网络的控制方案,从而改善系统的收敛性、稳定性和鲁棒性等。神经网络在交流调速领域中应用的一个主要问题是算法比较复杂,大多以仿真形式实现,控制效果有待于在实际系统中进一步检验。但与其他比较成熟的学科相比,神经网络理论还很不成熟,如计算较复杂,计算量大,难以满足实际控制要求,训练学习时算法收敛性问题等。
2.4 滑模变结构控制
滑模变结构控制根据被调量的偏差及导数,有目的地使系统沿着设计好的“滑动模态”的轨迹运动,与被控对象的参数和扰动无关,因而使系统具有很强的鲁棒性。一般来说,它根据系统的状态选择两个控制输入之一,相当于系统有两种结构,即使非线性对象快速到达预定的所谓“开关面”(也称“滑动面”),并使其沿着该开关面滑动,这时称系统处于滑动模态(Sliding Mode)。然而并不是所有系统都可实现变结构控制,设计时必须先判断滑动模是否存在。理想的滑模变结构控制可以使对象在滑动面上平滑运动,但是实际上由于器件存在延时和滞环.所以系统进入滑动态后不可避免地会出现抖振(Chattering),即在滑动面附近高频颤动。这可能引起设备毁坏等事故。因此,在电机交流控制系统中如何削弱抖动而又不失强鲁棒性,是目前研究的主要问题。
2.5 反馈线性化控制
反馈线性化就是通过非线性反馈或动态补偿的方法将非线性系统变为线性系统,然后再按线性系统理论设计控制器完成系统的各种控制目标。然而,非线性系统反馈线性化理论是采用坐标变换及状态或输出反馈矫正非线性系统的动力学特性,如果单纯地对线性化系统进行鲁棒控制器设计,并不一定能得到满意效果。另一方面,非线性系统反馈线性化方法要求参数精确已知或可被精确测量和观测。但电机在运行中参数会发生变化,这些都不可避免影响系统的鲁棒性,甚至会使系统性能变坏。
2.6 自适应控制
自适应控制是在系统运行过程中不断提取有关模型信息,该算法根据新的信息调整,它是克服参数变化影响的有力手段。自适应控制系统可看成有两个闭环(图2),一个是常规由控制器与被控对象组成的反馈环;另一个是控制器的参数调节环。
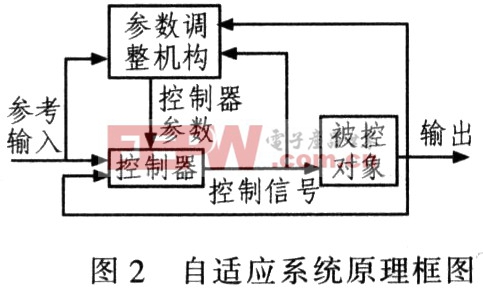
自适应控制在交流电机控制中主要问题是提高系统鲁棒性,以克服参数变化和各种扰动的影响。采用的主要方法是自适应控制如参数辨识自校正调节、模型参考自适应系统(MRAS)。其中,MRAS理论比较成熟,无需对象的精确数学模型,只要找到一个合适的参考模型即可,其关键问题是设计自适应参数调整规律,在保证系统稳定性的同时使误差信号趋于零。而模型参考自适应应用于反馈信号估计(如磁链、转矩、转速等)问题。但是辨识和校正需要有一个过程,对于较慢的参数变化,具有校正作用;而对于较快的参数变化,就难以获得好的动态效果。













评论