自平衡机器人的控制系统设计
3.4 速度PID控制算法
机器人采用经典的PID算法进行平衡控制。控制系统采用典型的双闭环控制结构和前馈控制方法。速度环路设计有利于提高电机输出速度精度。前馈控制主要是为了补偿电机转轴与车轮转动轴以及传动系统的间隙误差,这些误差是稳定的、可以测量的。当电机在正反转变换时,控制系统可以检测到变换方向,经过位置误差环节调整后把确定的偏差补偿量叠加到驱动器输出端。这样电机转动的角度在原理基础上增加了补偿量,机械误差得以修正。
采用PID控制算法公式如下:
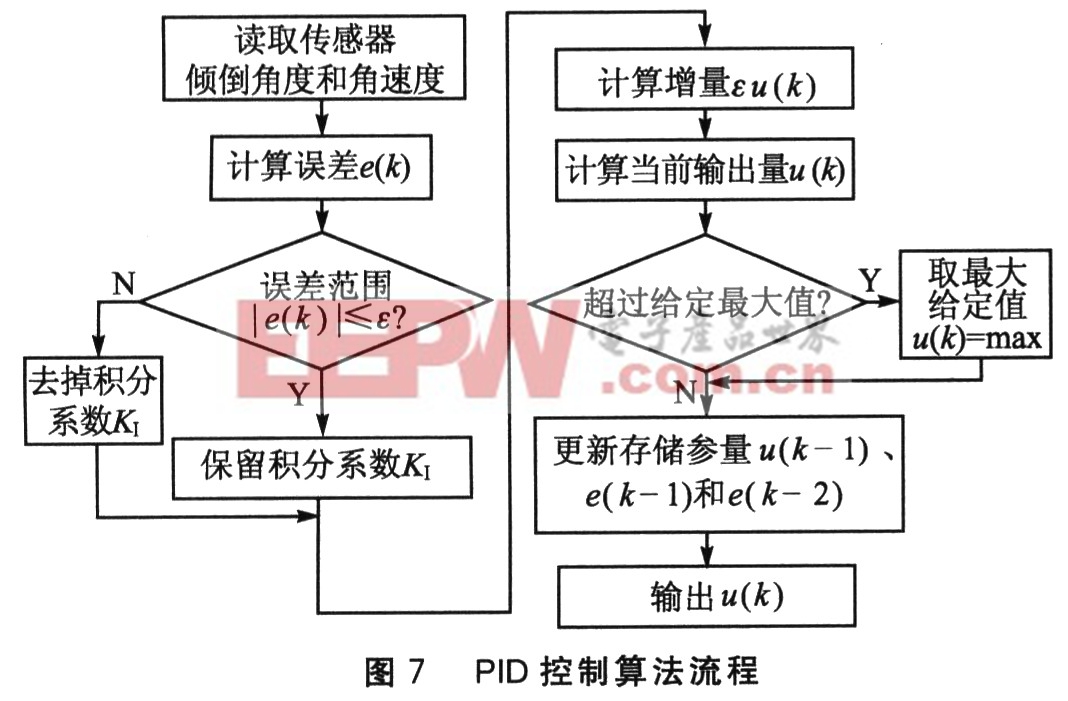
其中,u(k)为当前调节器输出量;u(k-1)为上一次调节器输出量;△u(k)为当前控制增量;e(k)为当前控制误差量;Kp为比例系数;KI为积分系数;Kd为微分系数。PID控制算法流程如图7所示。图中,ε为调试过程中设定的误差值。
4 实 验
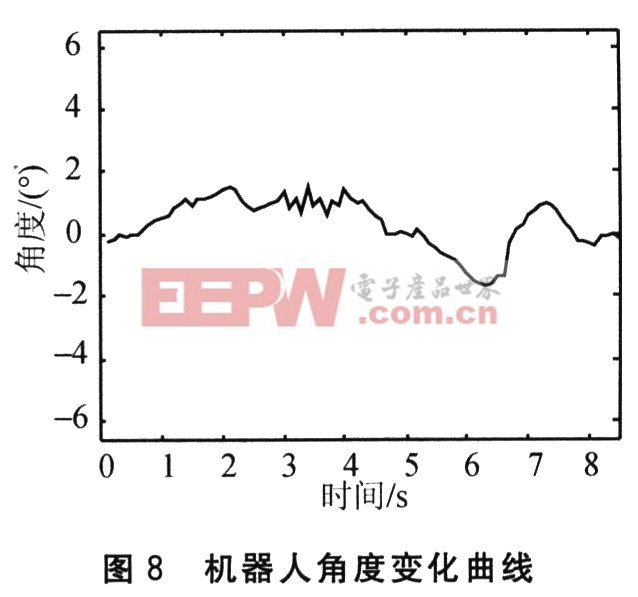
利用该控制方法,对原理样机进行了多次实验。实验中,在机器人正上方水平位置安装陀螺仪,以采集机器人的倾倒角度数据。实际测量角度信息随时间变化的曲线如图8所示。通过测得数据分析可以看到,机器人大致可以稳定在0°附近,最大偏差为±2°。
结 语
本文设计了以ATmage128单片机为控制核心,采用红外测距传感器监控的双轮自平衡机器人,并搭建实验平台进行了控制试验。实验结果表明,该机器人可以通过有效的控制保持在竖直状态,并且在一定的角度范围内达到平衡。

伺服电机相关文章:伺服电机工作原理
















评论