智能灭火机器人硬件电路设计及实现

智能机器人灭火比赛由美国三一学院于1994年创办,目前已成为全球规模最大、普及程度最高的全自主智能机器人大赛之一。硬件电路是智能灭火机器人整体的核心骨架,其参数性能及设计的合理性直接决定了智能灭火机器人的性能。本文完成了基于ARM9内核[3]的智能灭火机器人的硬件电路的设计与实现。
1 硬件电路的总体设计
灭火比赛的任务是在一封闭房间模型中,随机在其中一个房间里放置蜡烛代替的火源,要求机器人在尽可能短的时间里无碰撞地找到火源并完成灭火。
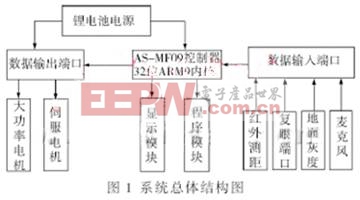
根据比赛要求及功能需要,灭火机器人的总体结构如图1所示,主要由控制器、传感器输入、驱动输出等模块组成。
2 硬件电路的主要部件分析与设计
2.1嵌入式系统
为实现机器人高速精确地按照规定路径行走,要求机器人的CPU能够实时迅速地读取多个传感器端口数值,并在较短的时间内完成对各端口数值的存储、运算和输出等多种任务。由于嵌入式微处理器对实时任务具有很强的支持能力,能够完成多任务并且具有较短的中断响应,因此在设计过程中选用以嵌入式微处理器ARM9为核心的控制器,其内部采用哈佛结构,每秒可执行一亿一千万条机器指令。
为提高端口数值读取速度,使机器人能对周围环境信息做出迅速判断,本设计在主芯片上设置了ADC0~ADC7(P4.0~P4.7)8路数据输入端口,每秒可实现50万次数据采集;另外又设置20路数据输入端口,通过ATMEGA816-PC辅助单片机连接到主芯片上,用以读取远红外传感器组及检测端口的数值,每秒可实现1 000次数据采集。本设计还设置了4路PWM控制信号输出端口,用以驱动4路大功率直流电机,实现对转速的精确调节;此外,还设置了7路Do数字输出端口,用以驱动伺服电机、蜂鸣器、继电器、发光二极管等。为了给庞大和复杂的程序提供更多的执行空间,本设计附加设置了100 KB的数据存储器(RAM)和512 KB的程序存储器(Flash ROM),用以存储更多的数据和命令。
2.2 电源和驱动电路设计
(1)电源及采样电路
电源是保证机器人稳定、可靠运行的关键部件,它直接影响着机器人性能的好坏。由于本机器人电机驱动和控制器采用两种不同等级电压的电源,为避免2个电源相互干扰,本机器人采用双电源供电系统:电机电源采用高放电倍率聚合物锂电池,容量为2 500 MAH,工作电压为24 V,能提供40 A的稳定供电电流,是普通电池的10倍;控制器电源采用8.4 V锂电池,并提供电压采样端口,以供电池检测,电路图如图2所示。

为获得CPU各端口电路所需要的不同等级的电压,本设计采用1个LM317T三端稳压器和2个AMS1117低压差线性电压调整器,并通过其附属电路,得到精确稳定的5 V、3.3 V、1.8 V 三种电压;采用1个发光二极管LD1和限流电阻R5作为电源指示灯,以显示电源开关的状态;为实时采样电源电压,防止锂电池过放或过充,设计中通过R1、R2分压,引出AD19端口作为电源采样端口。
(2)直流电机驱动电路
由于竞技比赛的需要,机器人要在避免碰撞的前提下尽可能提高速度,因此要求具有更大功率的驱动器和更灵敏的控制方式。为此本文采用的电机驱动电源电压为16.8 V,电流为20 A;采用占空比范围为0~95%的4路PWM信号控制直流电机,以实现精确的调速[4]。
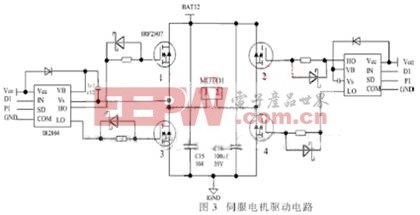
由于电机功率较大,并要求能实现双向、可调速运行,本文设计了半桥式电力MOSFET管,成功实现了对电机的控制。如图3所示,2路PWM信号通过IR2104半桥驱动器(half-bridge driver)和相应保护电路连接至型号为IRF2807 的MOSFET管,控制电源与电动机连接线路的通与断,达到控制电机速度的目的。当PWM信号占空比较大时,线路导通时间长,电机速度大;相反,当PWM占空比较小时,线路导通时间短,电机速度小。4个MOSFET管在不同时刻导通组合,实现控制电机转动方向:当MSFET管1和4导通时,电机端口1为正、2为负,电机正转;当MOSFET管2和3导通时,电机端口2为正、1为负,电机反转。
2.3 传感器
(1)红外测距传感器
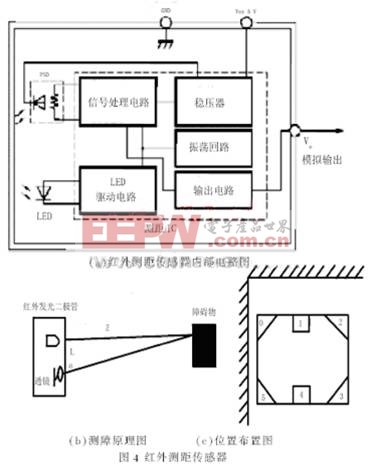
红外测距传感器[5-6]是机器人的“视觉器官”,通过不断读取其数值并进行判断,才能确定机器人所处位置环境,以确定机器人下一步该执行什么命令才不致碰撞,并按照理想的路线行走。依据比赛场地规格,本机器人采用SHARP公司的GP2D12PSD传感器(后面简称PSD传感器),其有效测距范围为10 cm~80 cm。其原理如图4(a)所示。










评论