行波超声电动机驱动控制系统设计

摘要:提出基于8254的行波超声电动机驱动计算机控制系统。控制系统电路简单,对二个相差90°的方波驱动信号控制相当方便。实验结果表明:系统不仅可实现频率和相位控制,并具有角度控制精确和克服温度漂移频率自动跟踪性能。
本文引用地址:https://www.eepw.com.cn/article/162299.htm
超声电动机是近年来出现的一种集电机、精密机械、电子技术、计算机技术和功能材料等于一体的新型高科技产品。它以无噪声、大转矩、响应速度快、不受磁场影响、控制性能好等特点,不仅可用于工业设备、仪器仪表、计算机外设、办公自动化和家用电器上,而且可用于机器人、汽车、生物医学工程、航空学工程、航空航天和军事设备上。因此,超声电动机被誉为新世纪的“绿色电动机”[1]。
由于超声电动机是利用摩擦传动的,定子和转子之间的滑差率不能完全确定,其谐振频率会随着温度而变化,因此,实际应用时需要对位置、速度和力矩进行控制。另外,超声电动机驱动电路是在高频、高压条件下驱动的容性负载,故效率比较低,致使超声电动机的工作频率比较低。定子谐振频率非常敏感于负载、环境条件,以及定子和转子之间的摩擦特性。因此,驱动控制系统中必须有自动跟踪谐振频率变化电路,以保持驱动频率总处于最佳的范围[2]。本文提出基于计算机常用8254芯片的行波超声电动机的驱动控制方法,将变频、变相控制方案有机地结合在一起,通过计算机实时控制,实现了行波超声电动机的精确角度控制和运行速度控制。
1 计算机控制系统组成及其原理
行波超声电动机要求输入二相交流电以产生定子环内部的行波运动,由于行波超声电动机的一相等效电路为容性电路,故可将方波信号中的高次谐波滤掉而形成正弦波。因此,要求所构成的系统能够产生二相电压有效值相等、频率相同的方波信号以驱动行波超声电动机,控制系统如图1所示。
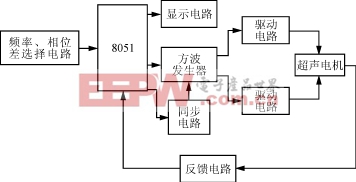
图1 驱动控制系统框图
根据二路方波信号相位差与定子环表面质点运动轨迹的关系可以确定,如果二路信号相位差90°(电角度)时,电动机处于最佳工作状态。通过改变相位差,可对位置、速度和力矩进行控制;为了防止谐振频率随环境温度的变化而发生漂移,可通过对输出方波信号频率进行控制,达到抑制谐振频率的漂移[3]。
方波发生器在单片机控制下,可产生两路相同频率、一定相位差的方波信号,作为驱动电路的输入控制信号;同步电路根据变频、调相的时序要求,单片机按序启动方波发生器,使两路信号具有一定的相位差;频率、相位差选择电路作为系统与操作者的人机接口;驱动部分为一推挽式逆变电源,提供超声电动机所需的驱动电流;单片机可对反馈频率检测,使驱动信号频率保持与压电振子固有频率一致。
2 方波发生器设计
8254是一种常用的可编程定时/计数器,具有三个独立的16位计数器,每个计数器有六种工作方式,其计数速度可达10MHz[4]。系统硬件电路的原理如图2所示。硬件电路是以8254产生二路方波信号及二路方波信号相位差的控制信号。计数器0和计数器1工作于方式3,即方波频率发生器方式。以产生二路同频率方波信号,并通过改变计数器数值实现变频控制。计数器2工作于0方式,即终止计数中断方式,用来控制计数器1允许与停止计数,使其滞后于计数器0数个时钟脉冲才开始计数,以便获得具有一定相位差的二路方波信号,且通过改变计数器2的计数值实现二路方波信号相位差的控制。工作于最小模式时,8254的WR由微机WR和IOWC通过或门产生;工作于最大模式时,8254的WR与IOWC连接。
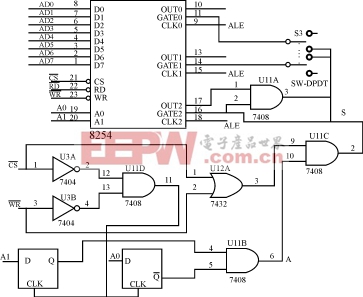
图2 方波发生器硬件框图

电动机相关文章:电动机工作原理设计












评论