一种基于模糊-PI双模控制器设计方法

摘要: 为了提高系统的控制性能,综合了模糊控制和PID控制的优点,提出一种基于模糊-PI双模控制器设计方法。典型的二维模糊控制器因缺少积分环节,难以消除稳态误差,控制的精度常常不能满足系统要求;而PI控制器具有良好的消除稳态误差的作用,所以将其与模糊控制器结合构成复合控制器。通过Matlab/Simulink仿真,结果表明,与经典的PID控制方式相比较,该控制方式在快速性、稳态性及准确性方面都有较大提高。
本文引用地址:https://www.eepw.com.cn/article/162295.htmPI控制作为PID控制的典型代表,以其算法简单、鲁棒性好及可靠性高,被广泛应用于工业过程控制和运动控制中。但传统PI控制适用于建立精确的数学模型的确定性控制系统,而大多数工业过程不同程度地存在非线性、大滞后、参数时变性和模型不确定性,因此普通的PI控制器难以获得满意的控制效果。模糊控制不要求被控对象的精确模型且适应性强,能够克服传统PI控制器的缺点,可以将模糊控制器与PI控制器结合起来构成复合控制器,模糊-PI双模控制同时具备PI控制的稳态性能和模糊控制的动态性能,起到良好的控制效果。
模糊-PI双模控制系统由模糊控制器(FC)和PI控制器并联组成,并由控制开关进行模式选择,其结构如图1所示。

图1 模糊-PI双模控制系统结构图
其工作原理是当系统偏差较大,落在某个阈值A以外时,就采用模糊控制以获得良好的动态性能;当系统偏差较小,落在阈值以内时,就采用PI控制以获得较好的稳态性能。
控制开关的控制规则可以描述为:

2 模糊-PI双模控制系统的设计
2.1 被控对象的选取
在控制工程实践中,典型的二阶系统很常见,即便对于许多高阶系统,在一定条件下也可近似作为二阶系统来研究。广义对象系统的传递函数可近似看为:
其中K1、K2是根据控制对象的变化可以取不同的数值来模拟系统的非线性特征。
2.2 PI控制器设计
为获得较好的稳态控制效果,普遍采用PI控制,也就是在系统中加入1个比例放大器和1个积分器。通过参数整定得到PI控制器的参数为Kp=0.5,Ki=8,单位阶跃响应曲线如图2所示。
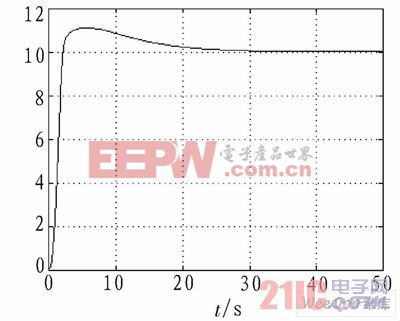
图2 单位阶跃响应曲线

pid控制器相关文章:pid控制器原理










评论