基于加速度回路的天线随动系统控制器设计
系统选取Cyclone系列的EP1C6T144FPGA芯片来实现对DSP和ADS8364各个功能引脚逻辑的灵活控制。作为系统前端数据采集的核心,选取TI公司的ADS8364芯片完成速率陀螺和电位计的信号采集工作。此外,为了保证信号的稳定性,在A/D前端加入射频电路芯片LM310。
系统采用PWM工作方式驱动直流力矩电机,由TMS320F2812产生PWM控制波形,然后由PWM功放MSK4201进行功率驱动,产生力矩电机所需要的驱动电流。MSK4201是一款完整的H桥电路,它可以用来驱动DC有刷电机或作为D类开关放大器,所有的高低驱动控制电路在内部集成,用户提供TTL兼容PWM信号,同时振幅和方向控制四象限模式,内部驱动电路提供适当的死区时间来保护每个半桥,全N沟道场效应管意味着两方面的阻力和交换能力效率的最佳模式。
同时,为了保证PWM驱动电路与DSP电路的之间的干扰减至最小,在系统设计中,采用光耦隔离芯片6N137将二者隔离。
系统与上位机的通信采取异步串行通信方式,RS 422接口芯片采用DS8921。同时采用SN74ALVTHl6245芯片避免回流,提高数据传输的稳定性。
3.2 系统软件实现
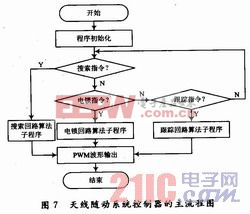
本系统采用数字PID控制算法,由TMS320F2812的事件管理器(EV)产生周期为0.1 ms的PWM波形信号,同时采用CPU定时器以1 ms的控制周期,控制驱动力矩电机实现天线转动。系统首先对DSP内部时钟模块、PIE模块、SCI模块、事件管理器等模块进行初始化,之后启动SCI模块,通过指定的通信协议,等待接收上位机的命令。当上位机发出启动伺服命令后,电机上电,控制天线保持零位电锁状态;当上位机发出搜索命令时,进入搜索回路子程序,天线从零点开始进行步进式搜索,当被动雷达天线发现到目标后,程序切换到跟踪回路子程序,由雷达数字接收机给定实时误差角信号,使天线进入目标跟踪状态。若目标丢失,则天线立即切换到搜索状态重新进行目标搜索。天线随动系统控制器的主流程图如图7所示。本文引用地址:http://www.eepw.com.cn/article/162203.htm
4 实验结果分析
实验以方位通道为例,对天线转动过程中的电位计采样数据整理分析如下,图8为角加速度回路引入系统前后对比曲线,通过比较可知,二者均是天线由0°转到20°的数据曲线,响应速度快、动态性能较好,没有明显的超调现象,总体输出良好。但是图8(a)表现出系统
存在一定的高频振荡,图8(b)表现出系统在引入角加速度回路负反馈后,随动系统的整体性能得到了很好的改善,抑制了尖峰干扰,数据输出曲线更加平滑,系统性能更加可靠。
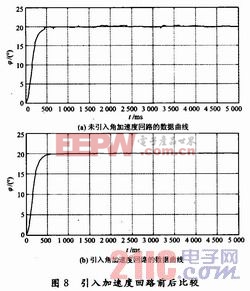
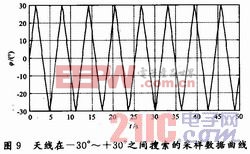
图9为天线在-30°~+30°范围内搜索的数据曲线,搜索曲线平稳连续,表明天线能够较好地实现步进式搜索。
5 结论
通过理论分析和硬件验证,所设计的基于加速度回路的天线随动系统具有精度高、稳定性好、结构简单等特点,引入角加速度回路后,可以很好地改善系统的跟踪精度,同时能够很好地抑制天线随动系统普遍存在的震颤现象,提高系统的稳定性,是一种高精度、弱耦合、抗目标丢失、快速平稳、可实现比例导引的随动系统。















评论