CAN总线技术在工业码垛机器人控制系统中的应用研究

目前在用的工业码垛机器人种类繁多,但根据其多轴控制系统的技术特点一般可分为三种类型:1)基于PLC的多轴控制系统;2)基于PC的多轴控制系统;3)基于总线的多轴控制系统。其中,总线控制系统具有数字信号传输、系统完全开放等优点,得到广泛的应用。笔者通过研究发现,基于现场总线,尤其是CAN总线的工业码垛机器人在实际应用中具有便于组网、性价比高、扩展性强等特点,在大工业生产中具有广阔的发展前景。
本文引用地址:https://www.eepw.com.cn/article/162196.htm工业码垛机器人
笔者所在科研团队开发的新型工业码垛机器人(机构简图如图1所示),其主体机械结构是基于平衡吊原理的七杆机构,具有承载力大、稳定性好、结构紧凑、节省能耗等特点。机器人的动力由四台交流伺服电机提供,分别负责机器人沿水平方向、沿垂直方向的直线运动,绕基座垂直轴的旋转运动和绕抓手转轴的旋转运动。四台电机既可单控,也可群控,大大简化了路径规划算法。
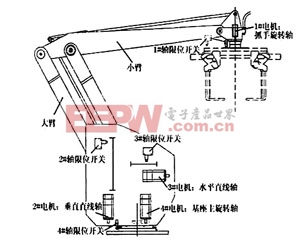
图1 新型工业码垛机器人机构简图
现场总线和CANopen
在工业控制领域,采用现场总线的最大优点是可以节约连接导线、维护和安装费用。同时,现场总线能够传送多个过程变量,而传统的4~20mA控制回路一般只能携带一个过程变量。采用现场总线后,在传输变量过程的同时,仪表的标识符和简单的诊断信息也可一并传送。采用现场总线的设备还具有更好的兼容性和扩展性。几种常见的现场总线性能如表1所示。
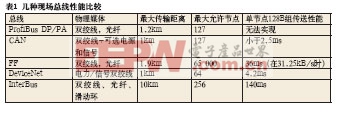
由上表可以看出,CAN总线在数据传输方面功能强大、性能优越,另外CAN总线传输速率较快,适用于大批量运动控制信息的实时交换处理。此外,CAN作为一种标准化的嵌入式网络,具有高度灵活的配置能力,从而在工业领域获得广泛应用。
CANopen协议是CAN-in-Automation(CiA)定义的标准之一,在发布后不久就获得了广泛承认。在工业技术十分先进的欧洲,CANopen协议被认为是在基于CAN的工业系统中占据领导地位的标准。依靠CANopen协议的支持,可以对不同厂商的设备通过总线进行配置。CANopen协议使开发人员从CAN相关事务的繁琐处理中解放出来,例如,位定时以及执行相关的功能。它提供了针对实时数据、组态数据以及网络管理数据的标准化通信对象,方便用于面向运动的机器控制网络。
硬件设计与实现
本工业码垛机器人的控制系统采用集散控制结构(见图2),选择高精度、大功率交流伺服电机作为主要执行器件。所选伺服电机电气性能好、响应速度快、变速时间短,具有较高的位置控制精度,为提升机器人的性能水平奠定了基础。需要指出的是,所选电机的伺服驱动器均具有CAN总线控制模式驱动功能且具有CANopen协议所需的完备对象字典,方便了笔者所在科研团队组建机器人运动控制网络。
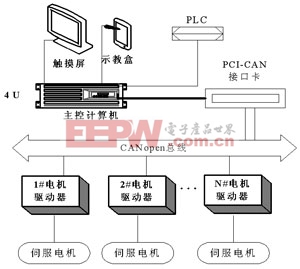
图2 工业码垛机器人运动控制系统图

伺服电机相关文章:伺服电机工作原理










评论