采用RS422A现场总线温控网络控制系统的结构及分析

RS422A是工业界广泛使用的双向、差动平衡驱动和接收传输线标准接口 ,它以全双工方式通信 ,支持多点连接 ,允许创建多达 32个节点的网络,具有传输距离远 (最大传输距离为 1200m) ,传输速率快 ( 1200m时为 100kbit/s)等优点 ,相对于其它总线,如FF、CAN、LonWorks等而言,具有结构简单、成本低廉、安装方便、与传统的DCS兼容等特点;此外,市场上很多现场仪表都有RS422A总线接口,因此采用该总线可以很容易地开发一些中小型网络测控系统。RS-422A总线是EIA公布的“平衡电压数字接口电路的电气特性”标准,这个标准是为改善RS-232C标准的电气特性,又考虑与RS-232C兼容而制定的。结合某一工程项目的实际特点 ,我们采用了RS422A通信接口来实现远程数据通信系统。
本文引用地址:https://www.eepw.com.cn/article/162195.htm在该工程项目中,系统采用两级主从总线型网络结构。温度等变量的控制主要由总线上的各个智能仪表实现,上位机根据控制要求修改智能仪表的给定值等参数,以及一些数字量的监控显示等。该项目所选智能仪表为上海大华-千野仪表有限公司生产,参数相当复杂,具有较强的控制以及通信功能。同时,利用上位机软硬件资源丰富,以Windows为操作平台,因此开发的应用软件有强大的管理功能以及非常友好的人机界面。本系统应用软件采用Microsoft Visual C++6.0开发,充分利用VC++灵活快速,对视窗编程和多任务编程的方便接口,开发出来的软件具有完善的数据采集、设定、报警、实时监视等功能。应用结果表明,该系统有效的实现了对温度控制系统的监控,效果良好。
系统结构
该智能仪表功能较为完善,控制精度高。自带RS422A通信卡,通信命令多达一百多条,上传及接受数据量大,主要包括各步温度设定值、PID参数值、报警参数值、传感器修正值、模糊控制参数值等等。现场总线采用RS422A总线,因为RS422A总线具有结构简单、成本低廉安装方便等优点。智能仪表挂接在 RS422A总线上,通过RS422A/232C装换器和PC串口相连接。为此配置有十几台(可扩展)智能仪表,RS422A/232C转换器一块,并且每一台仪表设置唯一的地址。温度的控制由下位机(智能仪表)完成。主控计算机完成的功能有1)主动读取下位机相关数据2)改变温度控制的设定值以及其它的参数,但不直接完成对温度的控制。3)显示温控曲线画面,温控仪集中显示画面以及报警数据等的动态显示。4)数据的存储,统计,报表等。系统的硬件结构图如图1所示。
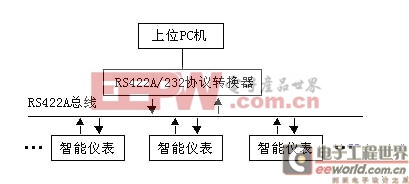
图1 系统的硬件结构图
通信协议
1) 物理层采用平衡型标准RS422接口 ,以提高数据传输的可靠性。在平衡型标准RS422A中,
发送器与接收器均以差分方式工作 ,每个信号用两根导线传输 ,信号的电平由两根导线上的信号的差值来表示。
2) 数据链路层本系统采用异步串行通信方式。系统约定,波特率:9600bps,偶校验,1个起始位,7个数据位,1个停止位,采用ASCII码作为传输代码。总线上的传输帧分为命令帧和数据帧。命令帧又分为为建立连接包含地址信息的地址命令帧和对已建立连接要求上传或者下传数据的控制命令帧。后者和数据帧的文本格式如下:

3)网络层由PC机实现该层协议的功能。总线上的传输帧中,地址命令帧是控制PC机以广播的形式发出,用于唤醒总线上的某台仪表,握手请求与之建立通信关系,然后相应的仪表向控制PC机回传本机地址,则握手成功;否则仪表向PC机回传否定应答。当PC机要和目前通信的仪表以外的其他仪表通信时,必须首先放弃目前的通信关系,发送放弃通信命令帧。然后再从新按照上述方式建立连接。建立连接,放弃连接以及温控仪的应答格式如下所示:

其中ENQ pEOT pACK 为控制码 结束码表示一帧的结束
4)应用层 工业智能仪表的RS422A总线网络系统的应用层,是对控制PC机与智能仪表之间相互传送的信息组帧,即数据格式按照一定的格式和含义进行定义。
系统软件设计
系统管理软件采用面向对象技术,基于Windows2000平台,用VC++6.0编程开发。系统应用软件由实时动态过程和历史记录浏览两大部分组成,实时动态过程包括数据采集及设定、运行控制、数据管理三大模块组成,数据采集及设定模块定时从下位机即智能仪表采集和设定过程实时数据。控制模块主要是控制仪表的运行或停止等以及运行段选择,数据管理模块包括数据通信、数据显示、报警、打印、存储等功能。
根据实时系统的特征,监控软件中多个任务同时运行,为了不让一个任务执行的时候,阻塞别的任务,我们充分里了Windows系统允许多进程、多线程编程的特点,将系统的分成几个模块。首先,将历史纪录浏览和实时动态过程分成两个进程,因为这两个过程有很大的差别。历史纪录浏览中的数据是静态的,对实时性没有要求,而且可以在生产过程之中或之后运行都可以,在开发这部分程序时,可以不用考虑时间的问题。实时动态过程却是一个实时性要求很高的任务,在这个过程中主要要完成通信、显示、控制、打印等任务,另外还要完成数据的转储。
(1) 动态进程设计
线程一词指程序指令顺序的执行,每个程序独立执行程序代码中的一系列指令。从用户或应用程序编程的角度看,程序中的线程是同时运行的。操作系统通常靠线程与线承建的快速切换控制来达到这种同时的感觉(但如果计算机有多个处理器,则系统可以直接同时执行线程)。程需要在某个时间完成多个任务时(许多引用程序都是这样),将每个任务放在不同的线程中不仅使程序更加有效,而且能简化开发工作。
在设计实时动态进程时我们把它分成了两个线程:主线程和通信线程。主线程定时启动通信线程,通信线程执行完一次通信任务后自动悬挂。在正常情况下,主线程两次恢复通信线程之间的时间是能够保证一次通信线程的完整执行。
在数据存储方面,为了提高系统的动态性能,要求能快速访问数据存储区,我们将数据存放在两个地方。正在进行的生产过程的过程数据首先存放在内存开辟的数据缓冲区内,这样主线程能很快的访问到。另外,将几次通信的数据定期存放到硬盘上,这样能防止因停电等意外事故造成数据的损失。
在程序设计时我们采用了面向对象设计的思想,比如我们把温控仪看成一个对象,有关的数据结构及其操作完全封装在一个类里面,这样程序的数据结构分离也可以实现分离,这对于软件的扩展,对于软件开发和调试都会带来极大的方便。
该软件主要实现方式如下:
在重载的void CRS422AnetView::OnDraw(CDC* pDC)函数里面调用自定义函数StartOfSystem(pDC),后者打开并配置好串口,启动通信线程,设置记时器等。其主要代码如下:
void CRs422AnetView::StartOfSystem(CDC *pDC)
{
……
m_hCom=CreateFile(m_sPort, GENERIC_READ | GENERIC_WRITE, 0, NULL,
OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL | FILE_FLAG_OVERLAPPED,NULL);
if(m_hCom==INVALID_HANDLE_VALUE)
return FALSE;
DCB dcb;
if(!GetCommState(m_hCom, dcb)) return FALSE;







评论