基于视觉传感器的自主车辆地面自动辨识技术研究
3 神经网络模式识别模块
应用Matlab中BP神经网络模块进行分类与识别。人工神经网络简称为神经网络。人工神经元k表示为:

式中:xi为输入信号;wik为神经元k的突触权值;m为输入信号数目;uk为线性组合器的输出;bk为神经元单元的阈值;f(·)为激活函数;yk为输出信号。神经元的输入/输出状态表示为:
式中:τij为突触时延;Tj为j的阈值;wij为i到j的突触连接系数;f(·)为变换函数。
该设计在分析多种数据分类方法和理论之后,以石子路面、水泥路面、土壤路面、草地路面、砖地路面5种常见行车路面为研究对象,采集了6组路面图像特征信息作为备选库,其中以质量最优的一组路面图像特征信息作为训练样本,把其他5组路面图像特征信息作为测试样本进行BP神经网络的建立、训练、测试。
3.1 BP神经网络的建立
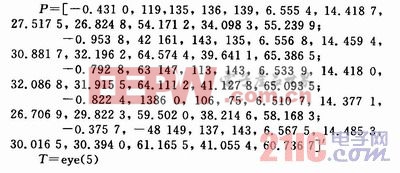
该设计在BP神经网络的建立过程中应用newff()函数对各个参数进行了相关设置。其训练样本、目标样本如下所示:
3.2 BP神经网络的训练
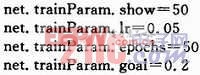
该设计在BP神经网络的训练过程中应用train()函数对各个参数进行了相关设置,其显示周期、学习速度、最大训练轮回数、目标函数误差如下所示:
3.3 BP神经网络的测试
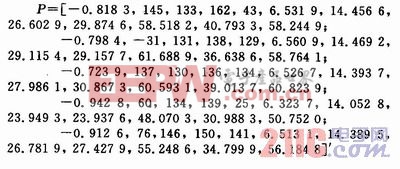
该设计在BP神经网络的测试过程中应用sire()函数对各个参数进行了相关设置,其测试样本如下所示:
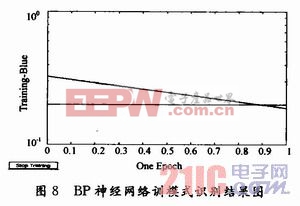
该设计中5种路面图像的BP神经网络模式识别训练目标函数误差为20%,实现了方便快捷的模式识别分类功能,结果如图8所示。
4 结语
文中研究的自主车辆地面自动辨识技术基于视觉传感器的地面图像信息自主识别技术,在诸多领域具有广泛的应用前景。通过对模式识别结果分析可知,训练目标函数误差为20%,该系统路面识别率达到预定要求,可以在智能车辆或移动机器人等相关领域普及使用。












评论