基于视觉传感器的自主车辆地面自动辨识技术研究
2.4 图像锐化
图像锐化可以在空间域中进行,常用的方法是微分法;亦可以在频率域中进行,常用的方法是高通滤波法。图像中的边缘或线条等细节部分与图像频谱中的高频成分相对应,因此采用高通滤波法让高频分量顺利通过,使低频分量受到抑制,就可增强高频的成分,使图像的边缘或线条变得清晰,实现图像的锐化。高通滤波可用空间域或频域法来实现。在空间域实现高通滤波通常是用离散卷积法,卷积的表达式是:
式中:g(m1,m2)是m×m方阵;f(n1,n2)是n×n方阵,冲击响应H是l×l方阵,归一化的冲击方阵可以避免处理后的图像出现亮度偏移,其中的H等效于用Laplacian算子增强图像。
该设计训练样本中石子路面图像的锐化图如图5所示。
2.5 图像增强
图像的直方图是图像的重要统计特征,是表示数字图像中每一灰度级与该灰度级出现的频数间的统计关系。用横坐标表示灰度级,纵坐标表示频数。按照直方图的定义可表示为:
式中:N为一幅图像的总像素数;nk是k级灰度的像素数;rk表示第k个灰度级;P(rk)表示该灰度级出现的相对频数。直方图修正通常有直方图均衡化和直方图规定化两大类。直方图均衡化是一种常用的灰度增强算法,是将原图像的直方图经过变换函数修整为均匀直方图,然后按均衡化后的直方图修整原图像。直方图的规定化是使增强后图像的灰度级分布是不均匀且具有规定形状的直方图,可以突出感兴趣的灰度范围。
该设计训练样本中石子路面图像的增强图如图6所示。
2.6 图像特征提取
图像特征是指图像的原始特性或属性。图像特征的提取有很多方法,其中比较典型的有:8连接边界特征、4连接边界特征、面积比特征、欧拉数特征、角点特征和矩特征。分别予以说明如下:
(1)边界特征。像素的4-邻域称像素的(i,j)的直接邻域,符号为d-近邻。像素的8-邻域是除去d-近邻的像素外剩下的对角线上的4个像素,称为(i,j)的非直接邻域,符号为i-近邻。
(2)面积比特征。为满足图像检索的要求把图像以图像质点为圆心,以距圆心最远的像素点为半径画圆,而后将圆的半径等距分成n份,画n个同心圆。设圆环内面积分别为s(1),s(2),…,s(n),如果图像面积用图像像素点表示,并将s(N)归一化,得到Ts(N)即:
式中:N为1,2,…,n;m00为总面积;s(N)为面积特征向量。
(3)欧拉数特征。在二值图像中1像素连接成分数C减去孔数H的值为图像的欧拉数。通常用E来表示图像的欧拉数,则:
(4)角点特征。角点检测方法有2种:提取图像边缘并以链码形式将其表示,而后找最大曲率的点作为角点;对图像灰度进行操作并计算图像灰度分布的曲率,找最大曲率的点作为角点。Harris算子定义为:
式中:k取0.04~0.06之间。当R(x,y)超过给定的阈值时则认为该点为图像的角点。
(5)矩特征:设二维连续函数f(x,y),(p,q)阶矩定义为:

式中:q=0,1,2,…。若矩是分段连续的且只在xy平面内具有非零值,则存在各阶矩。
该设计训练样本中石子路面图像的8连接边界特征图、4连接边界特征图、面积比特征、欧拉数特征、角点特征、矩特征如图7所示。
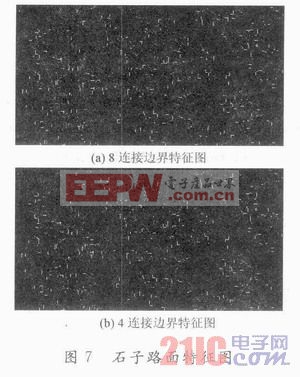
图7中,面积比特征为-0.431 0;欧拉数特征为119;角点特征为(1 075,1 024)135,(1 099,1 029)136,(956,1 031)139;矩特征为6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9。
同理,训练样本中5种路面的6个相关特征参数如下所示:
石子路面:-0.431 0,119,135,136,139,6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9;
水泥路面:-0.953 8,42,161,143,135,6.556 8,14.459 4,30.881 7,32.196 2,64.574 4,39.641 1,65.386 5;
土壤路面:-0.792 8,63,147,113,143,6.533 9,14.418 0,32.086 8,31.915 5,64.111 2,41.127 8,65.093 5;
草地路面:-0.822 4,138,60,106,75,6.510 7,14.377 1,26.706 9,29.822 3,59.502 0,38.214 6,58.168 3;
砖地路面:-0.375 7,-48,149,137,143,6.567 5,14.485 3,30.016 5,30.394 0,61.165 5,41.055 4,60.736 7。












评论