基于模糊控制的三相异步电动机软启动研究

摘要:三相异步电动机直接启动,存在较大的电流冲击,会引起电网电压下降,影响同一电网其他设备的正常运行。针对电动机的这一特性,介绍了一种基于模糊控制原理的三相异步电动机的软起动控制系统,通过在Simulink下建模、仿真,其结果证明了采用模糊控制的方法可以使三相异步电动机的启动电流减小,从而达到平稳起动的目的。
关键词:三相异步电动机;模糊控制;软起动;电网电压
由于三相异步电动机直接起动过程中,瞬时电流冲击很大,可高达额定电流的5~7倍,且起动转矩冲击也很大,这些将对电动机本身、拖动设备及电源设备的使用寿命有很大的影响,同时也会对电网电压造成很大的冲击。传统的电动机软启动方式有星形一三角起动,自耦变压器起动,串联电抗器起动等。这些方法存在大的电流冲击,转速冲击和转矩冲击等弊端。而当将模糊控制运用到三相异步电动机软启动时,可以通过对启动电流进行控制,使启动过程中无瞬间冲击。三相异步电动机软启动过程作为非线性时变被控对象,反馈电流与晶闸管触发角之间没有精确的数学模型,采用模糊控制算法,可以使整个系统的抗误差能力增强。因此,本文介绍了一种基于模糊控制原理的三相异步电动机软启动控制系统。通过仿真实验,可以得出采用模糊控制对三相异步电动机的软启动进行控制,具有很好的控制效果。
1 三相异步电动机的软起动技术
由于社会生产技术的不断发展和社会需求的不断增加,对三相异步电动机的起动性能提出了越来越高的要求,包括下面几个方面:尽可能小的起动电流;起动设备尽可能简单、适用,起动操作方便;起动过程中的功率损耗应尽可能的少;三相异步电动机能平稳地提升起动转矩;三相异步电动机的起动符合要求的机械特性曲线等。因此,提出了三相异步电动机软启动这种方法。传统老式三相异步电动机软启动,都是在原电动机系统上增加一个限流或降压设备,这样会使系统变的很复杂。其缺点有:一是设备体积大,重量重,耗电量增加,成本高;二是设备系统复杂不便于操作与管理,特别是有二次电流冲击,使设备故障率高,需要经常去维护,因此不宜用在频繁起动的设备上;三是调整不灵活,会产生较大的电流冲击。随着电力电子技术和计算机控制技术的飞速发展促进了软启动的发展。当把模糊控制渗透到三相异步电动机的软启动时,从而克服了传统软启动的一些缺点,把模糊控制的一些优点:系统结构简单,不依赖被控对象的数学模型,具有内在的并行处理机制,表现出很强的鲁棒性,算法简单,执行快等都应用到了三相异步电动机软启动中。
2 软启动模糊控制策略分析
2.1 模糊控制原理及模型建立
模糊控制,作为一种语言控制器,主要是模仿人的控制经验,因此模糊控制能近似地反映人的控制行为,其特性是对过程参数变化不太敏感,能克服非线性、时变和纯滞后因素的影响,不要求被控对象具有精确的数学模型,具有很强的鲁棒性。
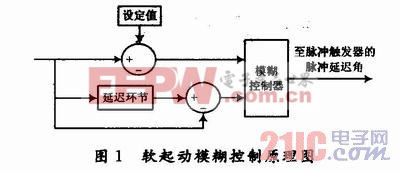
该系统针对三相异步电动机起动过程中反馈电流与晶闸管触发角之间没有精确的数学模型,采用的模糊控制方法把电动机起动电流与设定值之差E及其一个周期的变化率EC作为输入量,晶闸管触发角的变化值U作为输出量。控制过程中由模糊控制器对输入量模糊化、模糊推理,决策和对输出量去模糊化,最终得到输出控制量,来控制三相异步电动机晶闸管的触发角,改变三相异步电动机的输入电压,实现软起动。
本文的三相异步电动机软起动控制系统采用模糊控制的方法,其模糊控制系统原理图如图1所示。
2.2 电流偏差和电流变化率以及输出控制量的模糊化
电流偏差是指电流的给定值与检测感应电动机起动电流值的偏差值,电流变化率为一个采样周期内电流偏差的变化。从理论上讲,模糊控制量划分的状态维数越高,控制越精细。但是维数越高,控制规则将变得越复杂,控制算法的实现也变的十分困难。但如果将模糊控制量划分的状态维数太小,则在调节过程中容易出现振荡和调节“死区”。基于以上考虑把E的论域设为[-6,+6],EC的论域设为[-0.6,+0.6]。取E和EC的语言集为{NB,NM,NS,ZO,PS,PM,PB}。为了避免电动机起动电流产生较大的波动,同时考虑到实际应用中三相异步电动机调节所能达到的灵敏度,将模糊控制的输出控制量U的论域设定为[-1,1],输出控制量U论域的取值为输出触发角变化量的弧度值,取U的语言集为{NB,NM,NS,ZO,PS,PM,PB}。E,EC和U均采用三角形隶属度函数。电流偏差隶属函数曲线图如图2所示,电流偏差变化率和输出量的隶属函数曲线与前面所述的基本一致。













评论