基于模糊控制的三相异步电动机软启动研究
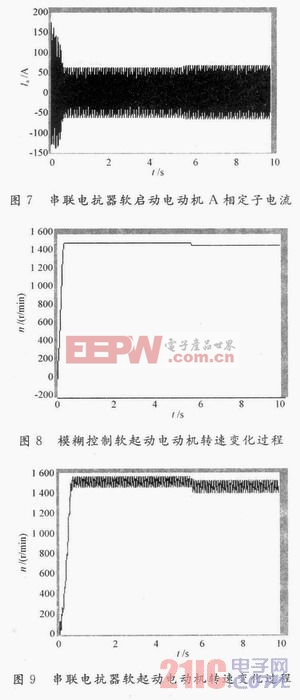
通过图6~图9的仿真结果可以看出,传统的电动机软启动(在这里选取了串联电抗器起动),存在大的电流冲击,转速冲击等弊端;而模糊控制应用到三相异步电动机软启动时,克服了电流,转速的冲击,起动的过程比较平稳。根据图6和图8的仿真结果可以看出,基于晶闸管模糊控制的电动机软起动的起动电流峰值限制在15 A左右,仅为额定电流的1倍左右,有效的抑制了起动电流的过冲;只是在突加负载的时候,造成了电流轻微的振荡,但冲击电流很小,最后稳定在20A左右;电动机的转速到达额定转速的时间非常短,上升时间只有0.2s左右,超调很小,起动过程非常平稳,当在电动机到达平稳后,突然给其加一个负载转矩时,可以看出电动机转速很平稳的减小,直到平稳为止。
5 结语
将模糊控制方法应用于三相异步电机软起动中,利用Matlab/Simulink的电力系统模块库和模糊工具箱建立了异步电动机的软起动仿真模型。仿真结果表明,用模糊控制实现对异步电动机软起动控制的方法,具有较好的动态性能,控制规则简单,鲁棒性强,能较好地克服传统起动方法存在的缺点,提高整个系统的可靠性。它的缺点是在优化设计中,模糊控制规则是人工建立的,无自主学习功能。




















评论