温度自动控制系统设计

摘要:基于MSP430系统平台,利用PID控制算法搭建了一个温度自动控制系统。系统包括温度采集、PID算法功率控制、人机交互等模块。系统采用数字式温度传感器精确测量温度值,430单片机用来实现PID算法及温度设定与显示等;双向可控硅光电耦合器用于调节功率。能实时监测温度值,测量温度范围广、分辨率高,调节温度迅速,控制温度实时精准、波动小,温度值显示准确稳定。
关键词:数字温度传感器;PID算法;双向可控硅;光电耦合器;人机交互
调温设备如冰箱、冰柜、空调已广泛地走进大众家庭,这些设备带给了人们更多的舒适,人们也越来越依赖它们。为此,我们小组搭建了一个温度自动控制系统,模拟调温设备在日常生活中的运作,深入探讨其工作原理及可优化潜力。
1 系统组成
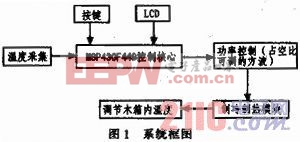
本系统以MSP430系统板为控制核心,包括温度采集、PID算法功率控制、调温、人机交互等模块。其采用数字式温度传感器DS18B20作为温度采样元件,在通用定时器B周期中断的控制下,低功耗单片机MSP430F449通过其通用I/O口从DS18B20读取采样值,再通过PID控制算法计算出控制量去控制主电路的电流方向和PWM波的输出。电流方向决定对控温对象进行加热或制冷,输出的PWM波驱动功率MOSFET IRF540,从而达到控制热电模块加热或制冷的功率的目的,系统组成框图如图1所示。
2 MSP430F449简介
MSP430F449是TI公司推出的16位超低功耗混合信号处理器,同时集成数字和模拟电路。其具有特点:16位CPU通过总线连接到存储器和外围模块;直接嵌入仿真处理,具有JTAG接口;多时钟能够降低功耗,多总线能够降低噪声;16位数据宽度,数据处理更有效。它的集成调试环境Embedded Workbench提供了良好的C语言开发平台。
MSP430F449的定时器A和定时器B都可以实现PWM:当定时器工作在PWM波产生模式,就可以利用寄存器CCR0控制PWM波形的周期,用另外寄存器控制占空比,生成PWM波方便。并且片内集成段式液晶驱动模块,便于显示温度值。
3 PID控制算法原理
3.1 PID控制系统筒介
PID控制系统如图2所示,D(s)完成PID控制规律,称为PID控制器。PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数e(t)=r(t)-y(t)的比例、积分和微分的线性组合构成控制量u(t),称为比例(Proportional)、积分(Integrating)、微分(Differ-entiation)控制,简称PID控制。
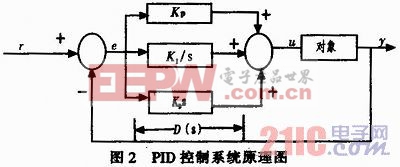
PID控制组合了比例控制、积分控制和微分控制这3种基本控制规律,通过改变调节器参数来实现控制,其基本输入输出关系为:
![]()
实际应用中,可以根据受控对象的特性和控制的性能要求,灵活采用比例(P)控制器、比例+积分(PI)控制器、比例+积分+微分(PID)控制器3种不同控制组合。
3.2 PID参数控制效果分析
PID控制的3基本参数为KP、KI、KD,这3项参数的实际控制作用为:
比例碉节参数(KP) 按比例反映系统的偏差。增大KP,系统的反应变灵敏、速度加快、稳态误差减小,但振荡次数也会加多、调节时间加长。在该反馈环中,该值主要影响速度。
积分调节参数(KI) 消除系统静态(稳态)误差,提高系统的控制精度。积分调节会使系统的稳定性下降,动态响应变慢,超调加大。积分控制一般不单独作用,而是与P或者PD结合作用。
微分调节参数(KD) 反映系统偏差信号的变化率,可以预见偏差的变化趋势,产生超前控制作用。因此,微分控制可以提高系统的动态跟踪性能,减小超调量,但对噪声干扰有放大作用。过强的微分调节会使系统剧烈震荡,对抗干扰不利。
常规的PID控制系统中,减少超调和提高控制精度难以两全其美。主要是积分作用有缺陷造成的。如果减少积分作用,静差不易消除,有扰动时,消除误差速度变慢;而加强积分作用时又难以避免超调,这也是常规PID控制中经常遇到的难题。所以在该系统中,对积分参数做了分段处理,已达到理想的效果。













评论