固定翼飞机竖直飞行控制系统方案设计

引言
本文引用地址:https://www.eepw.com.cn/article/161120.htm固定翼飞机水平飞行是最常见的飞行状态,让其做大仰角飞行则动作不能一直保持,如让其垂直于地面飞行能保持的时间则更短。本项目要实现的是一个可以让飞机垂直于地面飞行并可以稳定在固定高度的控制系统。利用在机身加入的三轴向加速度传感器来检测垂直于地面飞行的飞机的姿态。当检测到飞机前后摇摆时,控制水平尾翼使飞机保持前后方向的稳定性;当检测到飞机左右摇摆时,控制垂直尾翼使飞机保持左右方向的稳定性;当检测到飞机上下窜动时,控制油门的大小(即螺旋桨的转速)来保持飞机飞行高度的稳定性。当这些控制都很精准到位时,固定翼飞机也可以像直升机一样稳稳地悬停在空中了。利用本文设计的控制系统可以让飞机在做垂直飞行减速的同时顺时针或逆时针转90°(投影面积很小),这样就可以减小暴露给后面飞机的投影面积,减小被击中的几率。
设计概述
为了让飞机能竖直飞行,控制电路需要有以下功能:
判断飞机是否要竖直飞行 对于真飞机,它可能只是一个可防止误触发的拨动开关;在本项目的实验品遥控飞机里,它就是某一个通道的脉宽信号。当脉宽大于某一设定值时,控制电路就知道它该上场了。
判断自身姿态 这是本控制电路的核心部分之一,在控制飞机保持竖直飞行之前必须先判断自身的姿态。本项目用MMA7260QT传感器检测飞机的姿态。
控制 这是本项目设计制作过程中最耗时的部分,但其原理很容易理解:姿态电路已经了解了飞机的姿态,控制电路只要做相应动作就可以了。飞机前倾它就让飞机向前移动一些,后倾就向后移动一些。还有一个需要控制的量——高度,飞机在做此动作时高度是要保持稳定的,机身上冲时要减小油门,下降时要加大油门。要完成如此控制,要用两片MC9S08QG8。为了达到上述功能,本项目应有如图1所示的电路框图。
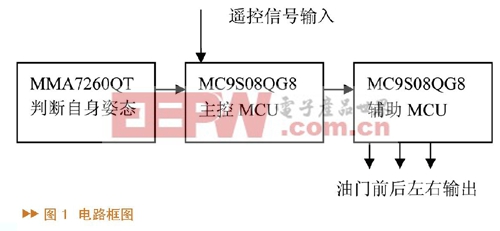
选用两片MC9S08QG8是因为在本项目里有两处对时间要求比较严格的地方:一是读从遥控器送出的脉宽;二是把经过运算的脉宽精确地发送出去,两处都要10μS以内的误差,如用一片来做即使用中断也会有冲突。本项目里两片MC9S08QG8工作的大体分配是:一片作为主控,用于读取遥控器送来的由接收机收到的脉宽(高实时性)、读取飞机姿态(低实时性)、控制运算(PID运算)和数据发送(把需要对飞机如何控制的数据,也就是PID运算的结果送给另一片MCU);另外一片作为辅助,只要把读到的数据实时发给飞机的执行机构就可以了。
硬件描述
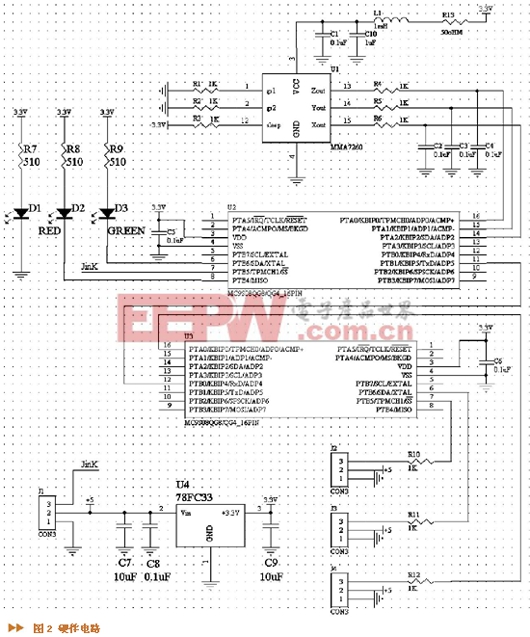
硬件电路如图2所示。








评论